Download
1 / 16
160 likes | 351 Vues
College of Engineering. ENGINEERING RESEARCH INSTITUTE OVERVIEW OF RESEARCH EXPERTISE In Robotics, Diagnostics and Control. BY Dr. Mohan J. Malkani, Associate Dean for Graduate Studies and Research Director Engineering Rsearch Institute (615) 963-5400, mmalkani@tnstate.edu.

E N D
College of Engineering ENGINEERING RESEARCH INSTITUTE OVERVIEW OF RESEARCH EXPERTISE In Robotics, Diagnostics and Control BY Dr. Mohan J. Malkani, Associate Dean for Graduate Studies and Research Director Engineering Rsearch Institute (615) 963-5400, mmalkani@tnstate.edu
ENGINEERING RESEARCH INSTITUTE (ERI) Research Centers and Laboratories ENGINEERING RESEARCH INSTITUTE (ERI) Research Centers and Laboratories • Center for Battlefield Sensor Fusion – ARO (2004) • Center for Environmental Engineering -- DOE (1996) • Center for Neural Engineering -- ONR (1992) • Digital Signal/ Image Processing Laboratory -- Air Force (1991) • Intelligent Control Systems Laboratory -- NASA (1993) • Design Methodologies Laboratory -- NASA (1993) • Intelligent Manufacturing Laboratory -- SME,ONR (1994) • Intelligent Health Monitoring Laboratory -- PSU/MURI-DURIP (1998) • Computer and Information Systems Laboratory -- DOD/HP (1996,99) • Automatic Target Recognition (ATR) Test-bed --- AFRL (2006-2008)
ERI MISSION ERI Conducts Research in “Cutting-Edge Technology” Areas • Intelligent Manufacturing • Human-Machine Interfaces • Sensors and Machine Vision • CAD/CAM/CAE Tools • Wireless Communication • Automatic Target Recognition • Cyber Security • Environmental Remediation • Probabilistic Design Methodologies ERI Conducts Research in “Cutting-Edge Technology” Areas Some ERI sample strengths are: Artificial Intelligence/NN/FL/GA Database Design&Data Mining Parallel&Distributed Computing Modeling, Simulation & Analysis Speaker Recognition Signal/ Image Processing Intelligent Control Systems Intelligent Health Monitoring Robotics and Automation
SMALL BUSINESS TECHNOLOGY TRANSFER (STTR) PROGRAM NASA 1994 PHASE I (PROPOSALS SELECTED FOR FUNDING OF STTR PHASE I CONTRACTS) • TRANSITIONS RESEARCH CORPORATION UNIVERSITY OF SOUTHERN CALIFORNIA Combined Distance and Orientation Sensor (CODOS) • AMHERST SYSTEMS, INC. STATE UNIVERSITY OF NEW YORK AT BUFFALO Foveal Sensor and Image Processor Prototype • ENDOROBOTICS CORPORATION UNIV OF CALIFORNIA BERKELEY Milli-Robots for Surgical Teleoperation SMALL SCALE ROBOTICS MID-SOUTHE ENGINEERING, INC. TENNESSEE STATE UNIVERSITY Spherical Motor and Neural Controller for Micro Precision Robot Wrist ROBOTICS RESEARCH CORPORATION JET PROPULSION LABORATORY Next Generation Controller for Redundant Robots AEROMOVER SYSTEMS CORPORATION THE UNIVERSITY OF MICHIGAN Differentiated Universal End Effector VISUAL INSPECTION TECHNOLOGIES, INC., SRI INTERNATIONAL Mobile Magnetic Robots for Inspection of Steel Structures
Center for Neural Engineering - Funded by ONR 1992 - 2004 VA DOE AFRL DOE NSA NASA NASA Health Monitoring Of NASP Hypersonic Structures Intelligent Control- Wind Power Analysis Localization Of Ventricular Arrhythmogenic Foci Chaos Control In A Fluidized Bed STTR In Robotics Nn Classification For Digital Communication Signal / Noise Separation & Blind Deconvolution 1996-1999 1994-1995 1991-1995 1994 1996-1999 1994-1996 1997-1998 NASA NASA ARC ONR Lockheed Martin ONR Embodiment of Intelligent Behaviors on Mobile Robots Biologically Motivated NN (PCNN) & Mobile Robots Robust Integrated Neurocontroller For Complex Dynamic Systems Predictive Maintenance Helicopter Control using NN, FL, GA 1995-Present 1995-Present 2000-2003 1992-Present 1993-1996 NSF CALTECH NSF NASA/JPL NASA Boeing Boeing ARMY TACOM Intelligent fault diagnosis tools Towards Telepresence Using Mobile Robots Virtual Tandem Vehicles- Mobility Controller For Mobile Robots Visual Telerobotic Task Planning Of Cooperative Robots Using Soft Computing Intelligent Aircraft Controller Air To Air Campaign Thunder Model Using Genetic Algorithms 1996-1998 1998-2003 1998-2000 2003-2005 1995-1996 1998-1999 Applied Research Lab - Penn. State University CBM of bearing and data acquisition Integrated predictive diagnosis for helicopter gear box Physics- based modeling of bearing Measure of effectiveness & performance for AI based monitoring systems Simulation based design using PDM, FEA & SM 1997-1998 1997-1998 1998-1999 1998-1999 1999-2000 April 2005
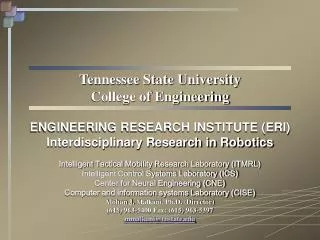
0.1 0.05 Filtered Signal -0.05 -0.1 -0.15 -0.2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Time (seconds) 80 60 40 10 15 20 CONDITION BASED MAINTENANCE Signal Processing Data Acquisition 0.3 80 0.2 0.1 60 0 Filtered Signal -0.1 40 -0.2 -0.3 20 -0.4 -0.5 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 25 10 15 20 Time (seconds) Critical System Components 60 Features Extraction Feature Vector Set Selection for Fault Diagnosis Probability of Fault Symptoms 50 40 30 20 Neural-Network Selection for Fault Diagnosis 10 0 Novelty Faults Banks of Neural Networks Diagnostics & Prognostics Rule-Based Fault Reasoning Diagnostic Data Fusion Causality Reasoning Fault Pattern Recognition Fault Pattern Classification)
Intelligent Control Systems Research Work “Control and Coordination of Multiple Unmanned Areal Vehicles (UAVs)” Tennessee State UniversityDepartment of Electrical and Computer Engineering Intelligent Control Systems (ICS) Lab(Dr. Saleh Zein-Sabatto, mzein@tnstate.edu) Design & Modeling Testing & Simulation Hardware Prototyping
Penn State - DARPA - MURI Project Autonomous Surveillance Perspectives Speech Recognition by Mobile Robots TSU will develop mapping that will be used by consortium partners Soldiers Recognize Commands and act TSU Robotics Lab TSU Robotics Lab Kinematic and Dynamic Module Man-Machine Fuzzy-Logic Three small mobile robots communicate and follow the commander Scheduling and Motion Controller Interface Static/Dynamic Communication Synchronization Module Parameters Protocols Schemes Neural-Network Physical Physical Terrain Learning Environment Environment Module Integrated Genetic-Algorithm Mobility Behavior-based Wireless Tactical Formation Cooperative Communication Supervisory Tactical Strategies Module Module Controller Behavior-based Navigation Module Signal/Image Sensory Info Algorithmic World Perception Processing Acquisition & Supportive Distributed Distributed Modeling Schemes Fusion Tools FMCell FMCell Module Simulation Simulation Diagnostic and Environment Environment ROBOTIC COMMUNICATION Conflicts Handling Module
Sensors Technology Thrust Research-AFRL (2006-2008) • Automatic Target Recognition- TSU (Lead) • Electro-Optics - University of Dayton (Lead) • Radio Frequency- Louisiana State Univ. (Lead) • ATR Consortium Member Universities: • Louisiana Tech University • Michigan State University • Prairie View A & M University • North Carolina A &T State University • Chaminade University of Hawaii
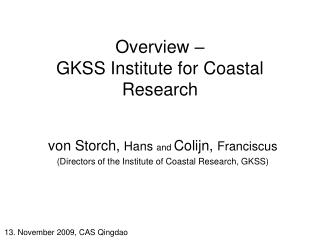
●C1 ●C5 ●C4 ●C7 ●C2 ●C3 ●C6 ATR Test-Bed (ATRTB)Electric Helicopter and 7 Cameras Surveillance System UAV at TSU Campus Student Research Participations Camera Surveillance System at TSU Faculty Participations
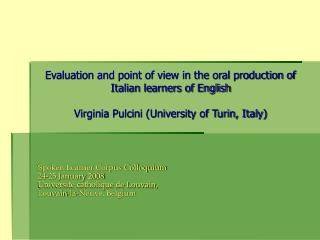
Clients Clients Tier 4 Server Tier 3 Internet 802.11 Access Point Heterogeneous Motes Gateway Low-resolution camera Tier 2 Robot with high resolution camera Tier 1 Helicopter with high-resolution camera motes with sensors and low-resolution cameras 802.15.4/zigbee Energy Efficient Wireless Multimedia Sensor Networks(Supported by AFRL-- ATR Project, 2007 - 2008) • Wireless Multimedia Sensor Networks Test-bed • Objective Develop a test-bed for energy efficient multi-hop wireless multimedia sensor networks to explore design tradeoffs in cross-layer protocols, error control schemes, mesh image/video transmission, etc.
Research Project for the Minority Leaders Sensors Program (Funded by AFRL, 2007 – 2008) diversity gain multiplexing gain Leverage MIMO technology in a cross-layer fashion involving network architecture, PHY, MAC, and routing protocols to multi-optimize networking performance and maximize network life in wireless sensor networks (WSNs) • Without using extra energy and channel, a MIMO transceiver can be used to • Extend transmission range, or reducing error rate at links by using diversity gain • Increase data rate at links by using multiplexing gain MIMO transceiver MIMO sensor network
` CENTER OF EXCELLENCE FOR BATTLEFIELD SENSOR FUSION (ARO) RESEARCH FOCUS AREAS • Systematic sensor data & information fusion • Sensors networking in battlefield situations • Multiple target identification and tracking • Battlefield source allocation and management • Networks modeling and simulation • Network performance measurements • Experimental testing & evaluation of sensor network concepts.
PARTNERSHIPS / CONTRACTS TACOM BRC Bevilacqua Research Corporation
2007-2008 ERI Funded Research projects • Center for Excellence in Battlefield Sensor Fusion, funded by Army Research Office (ARO) $2,331,255.(2004-2009)-Dr. Shirkhodaie (PI) 2. Multi-Mode UAV Sensor Technologies (Multi-MUST), funded by WPAFB, Air Force Research laboratory (AFRL)$137,000(2006-2007)-Dr. Shirkhodaie (PI) 3. Surface and Partially Buried UXO Identification, discrimination, and Localization Based on Cognitive Imagery Techniques, funded by Tyndall, AFRL $160,000 (2006-2007)-Dr. Shirkhodaie (PI) 4. Sensors Technology Thrust Research—(Automatic Target Recognition)-AFRL $780,000 (2006-2008)Dr. Mohan Malkani (PI) 5. Neural-Fuzzy Modeling in Model-Based Fault Detection, Isolation, Control Adaptation and Reconfiguration in Turbine Engines—funded by Propulsion Directorate (AFRL)---$ 288,520 (2007-2010)—Dr. Zein-Sabatto (PI) 6. Visual Telerobotic Task Planning of Cooperative Robots based on SoftComputing, funded by NASA/JPL $300,000 (2004-2007)-Dr. Shirkhodaie (PI) 7.Human Systems Integration (Seating Comfort)—Boeing--$750,000( 2007-2010)- Dr. Onyebueke (PI) 8..Cybersecurity-ORNL/BWXT Y-12 ---$538,149 Dr. Decatur B. Rogers (PI) (2207-2010) 9. Intelligent Cognitive inspection System for Manufacturing Process Automated Reasoning and Decision Making—fundedby Rolls Royce--$90,000 (200-2007)-Dr. Shirkhodaie (PI) 10. Failure Mode and Criticality Analysis of Maintenance Issue --funded by Aerospace Testing Alliance $50,000—Dr. Devgan (PI)
STRONG POINTS OF OUR RESEARCH CAPABILITIES • Suite of Digital Signal Processing Tools • Advanced Intelligence Tools: Neural Networks, Fuzzy Logic and Genetic Algorithms • Fault Detection and Health Monitoring • Intelligent Control System: Aircraft, Helicopter • Modeling, Simulation and Analysis • Systems Engineering • Mobile Robot Navigation • Sensor Fusion • Data Mining • Computer Integrated Manufacturing • Integrated Design Methodologies - FEM, SM and PDM • Patents and Technology Transfer • Information Technologies