MOBILE ROBOTICS
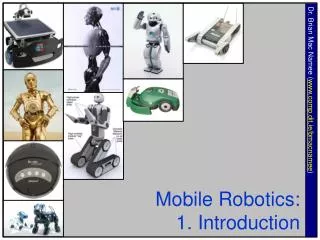
MOBILE ROBOTICS. What is it? A mobile robotics system controls a manned or partially manned vehicle-car, submarine, space vehicle . Mobile Robotics. Challenges: These system deals with external sensors and actuators

MOBILE ROBOTICS
E N D
Presentation Transcript
MOBILE ROBOTICS What is it? A mobile robotics system controls a manned or partially manned vehicle-car, submarine, space vehicle www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics • Challenges: • These system deals with external sensors and actuators • These system must respond in real time with activities of the system in its environment • It should acquire input from sensors. • It should control motion of its wheel and other moveable parts • It should plan its future path. • Problems: • Obstacles may block the robot’s path. • The robot may run out of power • Mechanical limitations may restrict accuracy • Robot may manipulate hazardous materials and unpredictable events may demand a rapid response. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics- Design Considerations Requests :Architecture must Req1: accommodate Deliberate and Reactive Behavior. Req2: allow for Uncertainty. Req3: account for dangers present in its environment or its operation. Req4:provide designer flexibility in application development, experimentation, and reconfiguration (new uploads). Examples: • Intentional: Collecting rock sample. • Reactive: Avoid an obstacle. • Uncertainty: Contradictory sensor reading • Account for dangerous: Fault tolerance, safety, performance Reduced power supply, dangerous vapors, unexpectedly opening of doors. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile robotics-Solutions1: Control Loop www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Solution 1: Control Loop • The controller initiates robot actions and monitors consequences. • Adjusts future plans according to monitored information. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile robotics-Solution 1 • Req1: Simplicity • Captures basic interaction between robot and environment. • Drawback: Not suitable for unpredictable environments • Why: Changes in the environments are continuous an requires continuous reactions. • Req2: Unknown (uncertainty) are reduced through iteration • Req3: Simplicity makes duplication easy and reduces of errors. Supports fault tolerance and safety. • Req4: Major components are separated from others and can be replaced independently www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile robotics-Solution 2-Layered architecture Layer 1: Motors, Joins.. Layer 2, 3: Deals with input from the real world Layer 4: Maintaining the robot’s model Layer5: Manages Navigation Layer 6, 7: Schedule and plan for actions Layer 8: Provides User Interface www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-2: Layered Architecture-evaluation • Req1: Side steps problems of control loop by • Different components are used to assign different tasks (Sensor integration) • Functions of components must be addressed(Sensor integration) • It also defines abstraction levels (Robot control, navigation) for design. • Services and requests are passed between adjacent components • Ex: Data requiring fast reaction may have to be sent directly from the sensor to the problem handling agent and corresponding commands may have to skip levels to reach the motors in time. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-2:Layered Architecture Problem: • It does not separate two abstraction hierarchies • Data hierarchy: Input level, Interpreted, Integrated • Control hierarchy: Motor control, Navigation, Scheduling , Planning , User-level control. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-2:Layered Architecture • Req2: Abstraction layers addresses the need for managing uncertainty • Uncertainty problem from lowest level will be solved at higher level • Uncertainty is handled very well • Conflicting sensor data is resolved at real world model. • Req3: Fault tolerance and passive safety are served by the abstraction mechanism • Data and commands are analyzed from different angles. • Req4: Replacement and addition of components are difficult due to Interlayer dependencies. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics- Task Control Architecture -Implicit Invocation www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-Implicit Invocation • Exception: Override currently executing task and causes exception • Exception handler can be used to handle task: retry or abort • Wiretapping: Messages can be intercepted by tasks superimposed on an existing task tree. • Safety check mechanism can use this method. • Monitors: Read information and execute some action if data fulfills a certain criteria www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-Implicit Invocation • Req1: Task tree, exception, wiretapping, monitors permits separation of action & reaction. • Req2: Uncertainty is less clear • Req3: Exception, wiretapping, monitoring used for performance check, safety, fault tolerance • Req4: Implicit innovation makes incremental development and replacement easier. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-Black Board A www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-Black Board A • Captain: Overall supervisor • Map Navigator: High Level path planner • Lookout: Module that monitors the environment for landmark • Pilot: the low level path planner and motor controller • Perception subsystem: Modules that accepts the raw input from multiple sensors and integrate it into a logical system. www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Mobile Robotics-Black Board A • Req1: The components communicate via the shared repository of the black board of the system. • Modules indicate their interest in certain types of information • Database returns data either immediately or after processing database. • Req2: It resolves some uncertainties • Modules responsible for resolving the uncertainty, register with the database to obtain the necessary data • Req3:Communication is via database. • Exception mechanism, wiretapping, monitoring safety and reliability are implemented in separate modules. • Req4: Blackboard architecture supports concurrency and decouples senders and receivers –supports maintenance www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS
Next…. • Cruise Control www.bookspar.com | Website for Students | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS