SPDM Overview
SPDM Overview. SPDM. Special Purpose Dexterous Manipulator (Dextre) Last robotics component of the International Space Station’s (ISS) Mobile Servicing System (MSS).

SPDM Overview
E N D
Presentation Transcript
SPDM • Special Purpose Dexterous Manipulator (Dextre) • Last robotics component of the International Space Station’s (ISS) Mobile Servicing System (MSS). • Highly advanced, two armed manipulator designed for delicate robotic tasks that would otherwise require an astronaut Extra Vehicular Activity (EVA). • Primary mission is to support maintenance of the ISS through • Handling and changeout of robotically compatible ORUs • Temporary accommodation of payloads on SPDM body • Inspection of ISS elements • Miscellaneous robotic tasks, e.g. actuation of MT stop, tether shuttle stop • Can operate from any PDGF (e.g. MBS, ISS) or can be carried to work site on end of SSRMS
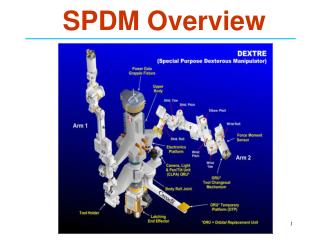
Physical Architecture Overview • Two seven-DOF arms • A grasping ORU/Tool Changeout Mechanism (OTCM) at the end of each arm • A central body structure that can rotate about its axis • A Power/Data Grapple Fixture (PDGF) at one end of the body • A Latching End Effector (LEE) at the other end of the body • A Tool Holder Assembly for retaining robotic tools while not in use • An ORU Temporary Platform (OTP) for mounting and transporting payloads • Cameras on the body to provide general worksite views
SPDM Stats • SPDM mass: 1688 kg • Peak Power (operational): 2000 W • Average Power (Keep-Alive): 600 W • Maximum payloads: • OTP: 600 kg • OTCM: 600 kg • LEE: 1000 kg • Maximum rates: • Arm POR • 0 kg: 7.5 cm/s, 2.5 deg/s • 600 kg: 3.0 cm/s, 1.0 deg/s • Body Roll Joint • 1.4 deg/s (permanently in vernier)
Hardware Configuration - OTCM Light EVA Drive Bolt OTVC Gripper Socket Drive Light Umbilical