Bayesian Filtering
Explore the key idea of explicit uncertainty representation and state estimation in probabilistic robotics through Bayesian filtering methods like Kalman filters and particle filters. Understand how sensor and action data are used to estimate the system state and the importance of the Markov assumption. Dive into the application of Bayes filters for localization problems in robotics using techniques such as probabilistic kinematics and proximity measurements. Delve further into representations for Bayesian robot localization, including Kalman filters, mixture density models, and particle filters. Learn about tree-based representations and multi-resolution filtering methods for efficient belief estimation. Discover algorithms like importance sampling and adaptive sampling for accurate state estimation in mobile robots.

Bayesian Filtering
E N D
Presentation Transcript
Bayesian Filtering Dieter Fox
Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) • Perception = state estimation • Control = utility optimization
Bayes Filters: Framework • Given: • Stream of observations z and action data u: • Sensor modelP(z|x). • Action modelP(x|u,x’). • Prior probability of the system state P(x). • Wanted: • Estimate of the state X of a dynamical system. • The posterior of the state is also called Belief:
Markov Assumption Underlying Assumptions • Static world • Independent noise • Perfect model, no approximation errors
Bayes Markov Total prob. Markov z = observation u = action x = state Bayes Filters
Bayes Filters are Familiar! • Kalman filters • Particle filters • Hidden Markov models • Dynamic Bayesian networks • Partially Observable Markov Decision Processes (POMDPs)
Localization “Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities.” [Cox ’91] • Given • Map of the environment. • Sequence of sensor measurements. • Wanted • Estimate of the robot’s position. • Problem classes • Position tracking • Global localization • Kidnapped robot problem (recovery)
Probabilistic Kinematics • Odometry information is inherently noisy. p(x|u,x’) x’ x’ u u
Proximity Measurement • Measurement can be caused by … • a known obstacle. • cross-talk. • an unexpected obstacle (people, furniture, …). • missing all obstacles (total reflection, glass, …). • Noise is due to uncertainty … • in measuring distance to known obstacle. • in position of known obstacles. • in position of additional obstacles. • whether obstacle is missed.
Mixture Density How can we determine the model parameters?
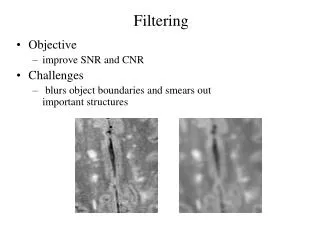
Raw Sensor Data Measured distances for expected distance of 300 cm. Sonar Laser
Approximation Results Laser Sonar 300cm 400cm
Representations for Bayesian Robot Localization • Kalman filters (late-80s?) • Gaussians • approximately linear models • position tracking • Discrete approaches (’95) • Topological representation (’95) • uncertainty handling (POMDPs) • occas. global localization, recovery • Grid-based, metric representation (’96) • global localization, recovery Robotics AI • Particle filters (’99) • sample-based representation • global localization, recovery • Multi-hypothesis (’00) • multiple Kalman filters • global localization, recovery
Tree-based Representation Idea: Represent density using a variant of Octrees
Tree-based Representations • Efficient in space and time • Multi-resolution
Particle Filters • Represent belief by random samples • Estimation of non-Gaussian, nonlinear processes • Monte Carlo filter, Survival of the fittest, Condensation, Bootstrap filter, Particle filter • Filtering: [Rubin, 88], [Gordon et al., 93], [Kitagawa 96] • Computer vision: [Isard and Blake 96, 98] • Dynamic Bayesian Networks: [Kanazawa et al., 95]d
Importance Sampling Weight samples: w = f / g
draw xit-1from Bel(xt-1) draw xitfrom p(xt | xit-1,ut-1) Importance factor for xit: Particle Filter Algorithm
Using Ceiling Maps for Localization [Dellaert et al. 99]
P(z|x) z h(x) Vision-based Localization
Under a Light Measurement z: P(z|x):
Next to a Light Measurement z: P(z|x):
Elsewhere Measurement z: P(z|x):
KLD-sampling • Idea: • Assume we know the true belief. • Represent this belief as a multinomial distribution. • Determine number of samples such that we can guarantee that, with probability (1- d), the KL-distance between the true posterior and the sample-based approximation is less than e. • Observation: • For fixed d and e, number of samples only depends on number k of bins with support:
Bayes Filter Reminder • Prediction • Correction
m Univariate -s s m Multivariate Gaussians
Kalman Filter Algorithm • Algorithm Kalman_filter( mt-1,St-1, ut, zt): • Prediction: • Correction: • Returnmt,St
Nonlinear Dynamic Systems • Most realistic robotic problems involve nonlinear functions