Download
1 / 20
200 likes | 340 Vues
EFFICIENT CHARACTERIZATION OF UNCERTAINTY IN CONTROL STRATEGY IMPACT PREDICTIONS . 8 th Annual CMAS Conference 19-21 th October, 2009. Antara Digar and Daniel S. Cohan Rice University. AIR QUALITY PROBLEMS.

E N D
EFFICIENT CHARACTERIZATION OF UNCERTAINTY IN CONTROL STRATEGY IMPACT PREDICTIONS 8th Annual CMAS Conference 19-21th October, 2009 Antara Digar and Daniel S. Cohan Rice University
AIR QUALITY PROBLEMS • Non-attainment of multiple pollutants (ozone & PM2.5) in multiple regions across US
CHALLENGES IN PLANNING ATTAINMENT Secondary Pollutants PM2.5 O3 CO NOx VOC NH3 PM Pb SOx Measure: Control Emission Issues: Controlling Multiple Pollutants Nonlinear Chemistry How Much to Control ? Which Measures are most Effective?
The Attainment Limbo Monitors measure pollution levels YES: Attainment demonstrated Does (DVF = Base DV * RRF) attain EPA standard? “Base Design Value” Model predicts relative reduction Base Future NO: Add more controls “RRF” = Future/Base
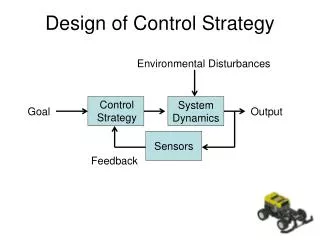
WHAT IF ADDITIONAL CONTROLS NEEDED TO ATTAIN States need to target additional pollutant reduction by adding more emission controls: Therefore, in order to attain target Cextra= DVF - NAAQS Model E C Yes Implement Control Strategy CHECK C Cextra Add more controls Selection based on $$ & feasibility No Repeat
DRAWBACKS OF CURRENT PRACTICE UNCERTAINTY
CAUSES OF UNCERTAINTY IN PAQM Due to imperfections in the model’s numerical representations of atmospheric chemistry and dynamics Due to error in model input parameters • Emission and Reaction Rates • Boundary Conditions • Meteorology
Chemistry PHOTOCHEMICAL AIR QUALITY MODELS Emissions Meteorology E or E Output Pollutant Concentration (e.g. O3) or Impact (e.g. O3)
EFFECT OF PARAMETRIC UNCERTAINTY Uncertain Boundary Conditions Uncertain Chemistry Uncertain Emission Range of Output Pollutant Concentration (e.g. O3) or Impact (e.g. O3) Uncertain Model Output
METHODOLOGY FOR PREDICTING ‘C’ IMPACT OF EMISSION REDUCTION • Pick an emission reduction scenario • Characterize probability distributions of uncertain input parameters • Compute sensitivity coefficients to emissions and uncertain inputs to create surrogate model equations • Apply randomly sampled (Monte Carlo) input parameters in surrogate model to yield probability distribution of ΔC Uncertainties of Input Parameter EMISSION REDUCTION MONTE CARLO Output C Sensitivity coefficients from HDDM or finite difference
UNCERTAINTY IN INPUT PARAMETERS References: aDeguillaume et al. 2007; bHanna et al. 2001; cJPL 2006 • Note: • Based on literature review ; All distributions are assumed to be log-normal
Uncertainty In Atlanta Ozone Attainment Modeling Summer Ozone Episode: May 29 – June 16, 2002 meteorology; Year 2009 emissions UNCERTAINTY IN PREDICTING IMPACT OF CONTROL STRATEGY 12km grid resolution
ATTAINMENT PLANNING OPTIONS CASE STUDY: Ozone attainment at worst Atlanta monitor (Confederate Avenue), accounting for parametric uncertainty ‘Likelihood of Attainment’ when Targeted Ozone Reduction is Uncertain Targeted Ozone Reduction is Perfectly Known Option 1 Option 2 Choose your own adventure
ATTAINMENT LIKELIHOOD FUNCTIONS • Option 1: • Targeted Ozone Reduction is Perfectly Known IF O3 ≥ Targeted Reduction, THEN Attainment, ELSE Non-Attainment Option 2: Targeted Ozone Reduction Uncertain (due to uncertain weather/meteorology) Suppose, future weather causes Actual Target = Target ± 3 ppb (assume normally distributed) Targeted O3 Reduction Perfectly Known Weather causes 3 ppb uncertainty in target Likelihood of attainment Likelihood of attainment Attainment Non- Attainment Attainment Non- Attainment Ozone Reduction (ppb) Ozone Reduction (ppb) Attainment Likelihood Function A Attainment Likelihood Function B
FINAL LIKELIHOOD OF ATTAINMENT • Hypothetical Emission Reduction: Implement all identified Atlanta region NOx control options, and replace Plant McDonough with natural gas • Uncertainties Considered: Domain-wide emission rates, reaction rates, and boundary conditions • Output: Probability distribution of ΔC for 8-hour ozone at Confederate Avenue monitor, for days exceeding ozone threshold Ozone Impacts From Monte Carlo / Surrogate Model 75% considering fixed target Attainment Likelihood Function A Probability Density 68% considering variable target Attainment Likelihood Function B Ozone Reduction (ppb) COMPARISON OF TWO SCENARIOS
LIKELIHOOD OF ATTAINMENT AS A FUNCTION OF CONTROL STRATEGY ASSUMING TARGET IS KNOWN ASSUMING TARGET IS UNCERTAIN Probability Plots for Different Scenarios
SUMMARY • Uncertainty is typically neglected in modeling impact of SIP control measures • Efficient new method to characterize probabilistic impact of controls under parametric uncertainty • Demonstration for Atlanta ozone case study • Can flexibly apply with alternate control amounts and input uncertainties • Can compute likelihood of attaining a known or uncertain pollution reduction target • Likelihood of attainment is far more responsive to amount of emission control if the target is known (fixed)
FUTURE PLAN OF ACTION • Explore the likelihood of ozone attainment under different available control scenarios • Extend to winter episode for PM2.5 • Assess which controls are most effective at improving attainment likelihood & health • Jointly consider uncertainty in cost, AQ sensitivity, and health estimates
ACKNOWLEDGEMENT • U.S. EPA • For funding our project (STAR Grant # R833665) • GA EPD • For providing emission data and baseline modeling • CMAS
For further information & updates of our project Contact: antara@rice.edu Log on to http://uncertainty.rice.edu/