
第三章 线性系统的能控,能观性
第三章 线性系统的能控,能观性. 控制 u(t) 对状态 x(t) 的控制能力 输出 y(t) 反映状态 x(t) 的能力. 第三章 线性系统的能控,能观性. 历史:1960 最优控制和最优估计的基础. 控制 u(t) 对状态 x(t) 的控制能力 输出 y(t) 反映状态 x(t) 的能力. 能控性. 能观性. 能控标准型. 能观标准型. 结构分解. 3.1 系统的能控性. 状态的能控性 定义 定理 3-1 推论 准则. 3 . 1 能控性定义. 1 线性连续定常系统能控性定义.

第三章 线性系统的能控,能观性
E N D
Presentation Transcript
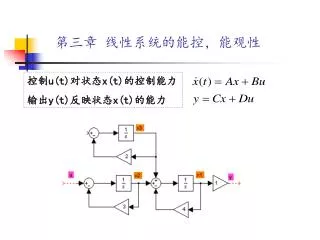
第三章 线性系统的能控,能观性 控制u(t)对状态x(t)的控制能力 输出y(t)反映状态x(t)的能力
第三章 线性系统的能控,能观性 历史:1960 最优控制和最优估计的基础 控制u(t)对状态x(t)的控制能力 输出y(t)反映状态x(t)的能力 能控性 能观性 能控标准型 能观标准型 结构分解
3.1 系统的能控性 状态的能控性 • 定义 • 定理 3-1 • 推论 • 准则
3.1 能控性定义 1 线性连续定常系统能控性定义 若存在分段连续的u(t),能在有限的时间区间内,使系统由某一初始状态x0,转移到指定的任一终端状态x(tf),则称次状态是能控的.若系统所有的状态都是能控的,则称此系统是状态完全能控的,简称系统能控.反之,只要有一个状态不能控,就称系统不能控.
P2 P1 P3 P P4 P5 3.1 能控性定义 1)对于线性定常系统常选t0=0, x(tf)=0 2)可选x(t0)=0, x(tf)任意 状态能达 3) 分段连续的u(t), 无约束
3.1 能控性定义 • 线性时变系统定义 若存在输入信号 ,能在有限时间 内,将系统的任意一个初始状态 转移到终端状态 ,那么,称该系统的状态变量 在时刻 是完全能控的,或简称系统在时刻t0是能控的。否则,系统就是不完全能控的,或简称不能控的。
-1 -2 3.1 能控性定义 能控性的例子: 2 线性离散定常系统能控性定义
3.1 能控性定义 2 线性离散定常系统能控性定义 存在控制序列u(k),u(k+1),..,u(N-1),能将第k步的某个状态x(k),在第N步上到达零状态,x(N)=0.其中N是大于k的有限正数.那么就说系统在第k步上是能控的.若系统在第k步所有的状态x(k)都是能控的,则称此系统是状态完全能控的,简称系统能控.反之,只要有一个状态不能控,就称系统不能控.
3.2 线性定常系统能控性判别 • 单输入系统 N阶线性定常系统能控的充要条件为能控性判别阵 的秩等于n. rank(M)=n
3.2 线性定常系统能控性判别 例题 3-1 判别系统的可控性 解: 系统不能控
3.2 线性定常系统能控性判别 例3-2 判别系统的可控性 解: rank(M)=3=n 所以系统能控
3.2 线性定常系统能控性判别 例3-3 判别系统的可控性 解: 系统能控
3.2 线性定常系统能控性判别 解: 系统能控 此结论可推广到高阶约当型的系统
3.2 线性定常系统能控性判别 • 多输入多输出系统 N阶线性定常系统能控的充要条件为能控性判别阵 的秩等于n. rank(M)=n 系统能控
3.2 线性定常系统能控性判别 例题 3-4判别系统的可控性 解: 系统能控
3.3 线性连续定常系统能观性 能观性: 如果对于任意给定的输入u(t), 在有限的观测时间,tf>t0,使得根据[t0,tf]期间的输出y(t), 能唯一地确定系统在初始时刻的状态x(t0),则称状态x(t0),是能观测的.若系统的每一个状态都是能观测的,则称系统是状态完全能观测,或简称系统能观. • y(t)反映x(t)的能力. u==0 • m=n, x=C-1y • 可由x0 x(t)
3.3 线性连续定常系统能观性 a b
3.3 线性连续定常系统能观性 能观性判别: N阶线性定常系统能观的充要条件为能观性判别阵 的秩等于n. rank(N)=n
3.3 线性连续定常系统能观性 证明:
3.3 线性定常系统能观性判别 例题 3-5判别系统的能观性 解: 系统能观
3.3 线性定常系统能观性判别 • 对角型系统的能观性 满足: 系统能观
3.3 线性定常系统能观性判别 • 约当型系统的能观性 解: 系统能观 此结论可推广到高阶约当型的系统
3.4 离散时间系统的能控性和能观性 • 能控性 在有限个采样周期内,u(k) 证明:在3步内{选择u(0),u(1),u(2)}可将非零状态x(0), x(3)=0转移到零状态.
3.4 离散时间系统的能控性和能观性 u(1) u(0) u(2) x(2) x(1) x(3)=0
3.4 离散时间系统的能控性和能观性 u(1)
3.4 离散时间系统的能控性和能观性 M满秩,系统能控 N阶线性定常系统能控的充要条件为能控性判别阵 系统能控 的秩等于n. rank(M)=n
3.4 离散时间系统的能控性和能观性 能观性判别: N阶线性定常系统能观的充要条件为能观性判别阵 的秩等于n. rank(N)=n 非奇异变换不改变系统的能控性和能观性.
3.6 能控性与能观性的对偶关系 两个系统 满足如下条件: 则称它们是互为对偶的. r维输入的m维输出的n阶系统. m维输入的r维输出的n阶系统.
u1 x1 y1 B1 系统1 C1 A1 x2 u2 y2 系统2 C2=B1T B2=C1T A2=A1T 3.6 能控性与能观性的对偶关系
3.6 能控性与能观性的对偶关系 对偶原理 系统1的能控性(能观性)等价于系统2的能观性(能控性)
3.7 能控标准型与能观标准型 • 单输入系统的能控标准型 如果系统状态完全能控性
3.7 能控标准型与能观标准型 • 单输入系统的能控标准型
3.7 能控标准型与能观标准型 单输入能控标准型系统的传递函数为 例题: 3-12 求能控标准型1
3.7 能控标准型与能观标准型 rankM=3
3.7 能控标准型与能观标准型 能控标准型2
3.7 能控标准型与能观标准型 • 单输入系统的能控标准型2 如果系统状态完全能控性
3.7 能控标准型与能观标准型 • 单输入系统的能控标准型2
3.7 能控标准型与能观标准型 • 单输入系统的能观标准型 如果系统状态完全能观
3.7 能控标准型与能观标准型 • 单输入系统的能观标准型1
3.7 能控标准型与能观标准型 • 单输入系统的能观标准型2 如果系统状态完全能观
3.7 能控标准型与能观标准型 • 单输入系统的能观标准型2
3.7 能控标准型与能观标准型 例题:求3-12的能观标准型2 rankN=3
3.7 能控标准型与能观标准型 例题: