Chapter 12 Equilibrium and elasticity
Chapter 12 Equilibrium and elasticity. Equilibrium We already introduced the concept of equilibrium in Chapter 8: dU ( x ) /dx = 0 More general definition of equilibrium: Static equilibrium :

Chapter 12 Equilibrium and elasticity
E N D
Presentation Transcript
Chapter 12 Equilibrium and elasticity
Equilibrium • We already introduced the concept of equilibrium in Chapter 8: dU(x)/dx = 0 • More general definition of equilibrium: • Static equilibrium: • Stable equilibrium: the body returns to the state of static equilibrium after having been displaced from that state. Unstable equilibrium: the state of equilibrium is lost after a small force displaces the body
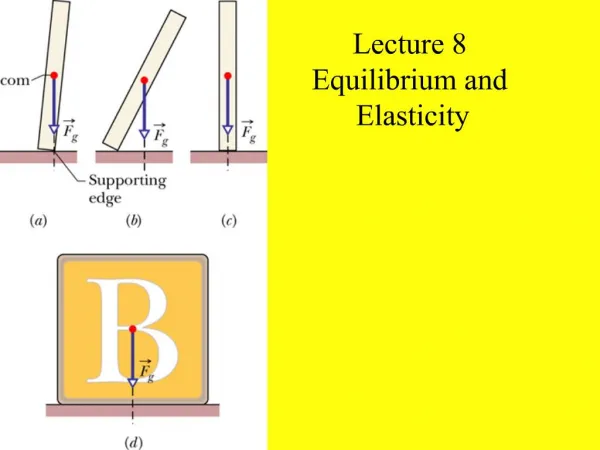
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the com) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the com) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the com) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the com) and its direction relative to the possible point(s) of rotation
Center of gravity • Gravitational force on a body effectively acts on a single point, called the center of gravity • If g is the same for all elements of a body (which is not always so: see for example Chapter 13) then the center of gravity of the body coincides with its center of mass
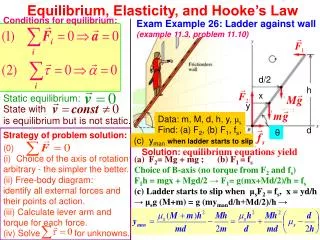
The requirements of equilibrium • For an object to be in equilibrium, we should have two requirements met • Balance of forces: the vector sum of all the external forces that act on the body is zero • Balance of torques: the vector sum of all the external torques that act on the body, measured about any possible point, is zero
Equilibrium: 2D case • If an object can move only in 2D (xy plane) then the equilibrium requirements are simplified: • Balance of forces: only the x- and y-components are considered • Balance of torques: only the z-component is considered (the only one perpendicular to the xy plane)
Chapter 12 Problem 67
Chapter 12 Problem 27
Indeterminate structures • Indeterminate systems cannot be solved by a simple application of the equilibrium conditions • In reality, physical objects are • not absolutely rigid bodies • Concept of elasticity is employed
Elasticity • All real “rigid” bodies can change their dimensions as a result of pulling, pushing, twisting, or compression • This is due to the behavior of a microscopic structure of the materials they are made of • Atomic lattices can be approximated as sphere/spring repetitive arrangements
Stress and strain • All deformations result from a stress – deforming force per unit area • Deformations are described by a strain – unit deformation • Coefficient of proportionality between stress and strain is called a modulus of elasticity • stress = modulus * strain
Thomas Young (1773 – 1829) • Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/L • The modulus for tensile and compressive strength is called the Young’s modulus
Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/L • The modulus for tensile and compressive strength is called the Young’s modulus
Shearing • For the stress, force vector lies in the plane of the area • Strain is a dimensionless ratio Δx/L • The modulus for this case is called the shear modulus
Hydraulic stress • The stress is fluid pressure p (Ch.14) • Strain is a dimensionless ratio ΔV/V • The modulus is called the bulk modulus
Answers to the even-numbered problems Chapter 12: Problem 8 (a) 2.77 kN; (b) 3.89 kN
Answers to the even-numbered problems Chapter 12: Problem 10 8.3 kN
Answers to the even-numbered problems • Chapter 12: • Problem 14 • 49 N; • (b) 28 N; • (c) 57 N; • (d) 29º
Answers to the even-numbered problems Chapter 12: Problem 38 56.0 mJ
Answers to the even-numbered problems • Chapter 12: • Problem 48 • 50º; • (b) 0.77 mg