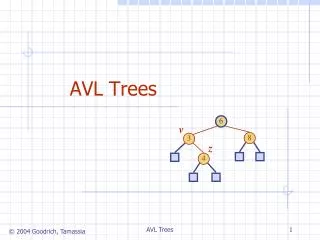
AVL Trees
AVL Trees. Dynamic tables may also be maintained as binary search trees. Depending on the order of the symbols putting into the table, the resulting binary search trees would be different. Thus the average comparisons for accessing a symbol is different.

AVL Trees
E N D
Presentation Transcript
AVL Trees • Dynamic tables may also be maintained as binary search trees. • Depending on the order of the symbols putting into the table, the resulting binary search trees would be different. Thus the average comparisons for accessing a symbol is different.
Binary Search Tree for The Months of The Year Input Sequence: JAN, FEB, MAR, APR, MAY, JUNE, JULY, AUG, SEPT, OCT, NOV, DEC JAN FEB MAR JUNE MAY APR JULY SEPT AUG DEC OCT Max comparisons: 6 Average comparisons: 3.5 NOV
A Balanced Binary Search Tree For The Months of The Year JAN Input Sequence: JULY, FEB, MAY, AUG, DEC, MAR, OCT, APR, JAN, JUNE, SEPT, NOV Max comparisons: 4 Average comparisons: 3.1 JULY FEB MAY AUG MAR OCT APR DEC JUNE NOV SEPT
Degenerate Binary Search Tree APR AUG Input Sequence: APR, AUG, DEC, FEB, JAN, JULY, JUNE, MAR, MAY, NOV, OCT, SEPT DEC FEB JAN JULY JUNE MAR MAY NOV Max comparisons: 12 Average comparisons: 6.5 OCT SEPT
Minimize The Search Time of Binary Search Tree In Dynamic Situation • From the above three examples, we know that the average and maximum search time will be minimized if the binary search tree is maintained as a complete binary search tree at all times. • However, to achieve this in a dynamic situation, we have to pay a high price to restructure the tree to be a complete binary tree all the time. • In 1962, Adelson-Velskii and Landis introduced a binary tree structure that is balanced with respect to the heights of subtrees. As a result of the balanced nature of this type of tree, dynamic retrievals can be performed in O(log n) time if the tree has n nodes. The resulting tree remains height-balanced. This is called an AVL tree.
AVL Tree • Definition: An empty tree is height-balanced. If T is a nonempty binary tree with TL and TR as its left and right subtrees respectively, then T is height-balanced iff (1) TL and TR are height-balanced, and (2) |hL – hR| ≤ 1 where hL and hR are the heights of TL and TR, respectively. • Definition: The Balance factor, BF(T) , of a node T is a binary tree is defined to be hL – hR, where hL and hR, respectively, are the heights of left and right subtrees of T. For any node T in an AVL tree, BF(T) = -1, 0, or 1.
Balanced Trees Obtained for The Months of The Year -2 0 0 RR MAR MAY MAR -1 0 0 MAY NOV MAR 0 (a) Insert MARCH NOV (c) Insert NOVEMBER -1 +1 MAR MAY 0 0 +1 MAY NOV MAY 0 (b) Insert MAY AUG (d) Insert AUGUST
Balanced Trees Obtained for The Months of The Year (Cont.) +2 +1 MAY LL MAY 0 +2 0 0 NOV MAR NOV AUG +1 0 0 AUG APR MAR 0 (e) Insert APRIL APR 0 +2 MAR MAY -1 0 0 -1 LR MAY NOV AUG AUG 0 0 0 0 +1 NOV APR APR JAN MAR 0 JAN (f) Insert JANUARY
Balanced Trees Obtained for The Months of The Year (Cont.) +1 +1 MAR MAR -1 -1 -1 -1 MAY AUG MAY AUG 0 0 0 0 0 +1 NOV APR JAN NOV APR JAN 0 0 0 JULY DEC DEC (h) Insert JULY (g) Insert DECEMBER
Balanced Trees Obtained for The Months of The Year (Cont.) +2 +1 MAR MAR RL -2 -1 -2 0 MAY MAY AUG DEC 0 0 0 +1 +1 0 NOV NOV APR AUG JAN JAN 0 0 0 -1 0 JULY APR DEC JULY FEB 0 FEB (i) Insert FEBRUARY
Balanced Trees Obtained for The Months of The Year (Cont.) DEC MAY AUG AUG FEB JAN JULY MAY 0 APR FEB +2 MAR 0 LR -1 -1 JAN 0 +1 DEC MAR 0 -1 +1 NOV 0 +1 -1 -1 0 -1 JULY APR 0 0 0 0 NOV JUNE JUNE (j) Insert JUNE
Balanced Trees Obtained for The Months of The Year (Cont.) AUG AUG FEB FEB -1 -1 JAN JAN RR +1 -1 +1 0 DEC MAR DEC MAR -2 -1 +1 0 0 -1 +1 0 JULY MAY JULY NOV 0 0 0 0 0 -1 0 JUNE APR OCT MAY NOV JUNE APR 0 OCT (k) Insert OCTOBER
Balanced Trees Obtained for The Months of The Year (Cont.) DEC MAR AUG FEB JULY NOV -1 JAN -1 +1 -1 -1 0 +1 0 -1 0 0 APR JUNE OCT MAY 0 SEPT (i) Insert SEPTEMBER
Rebalancing Rotation of Binary Search Tree • LL: new node Y is inserted in the left subtree of the left subtree of A • LR: Y is inserted in the right subtree of the left subtree of A • RR: Y is inserted in the right subtree of the right subtree of A • RL: Y is inserted in the left subtree of the right subtree of A. • If a height–balanced binary tree becomes unbalanced as a result of an insertion, then these are the only four cases possible for rebalancing.
Rebalancing Rotation LL LL +1 A +2 A 0 B 0 B BL 0 A +1 B AR AR h+2 h+2 h BL BR BL BR BR AR height of BL increases to h+1
Rebalancing Rotation RR RR -1 A -2 A 0 B 0 B 0 A BR -1 B AL AL h+2 h+2 BR BL BR BL AL BL height of BR increases to h+1
Rebalancing Rotation LR(a) +1 A +2 A 0 C LR(a) 0 B -1 B 0 B 0 A 0 C
Rebalancing Rotation LR(b) 0 B -1 A CR CR LR(b) +1 A +2 A 0 C 0 B -1 B AR AR h+2 h+2 0 C +1 C h BL BL h BL AR CR CL CL CL h
Rebalancing Rotation LR(c) +1 B 0 A CR 0 C +2 A LR(c) -1 B AR h+2 -1 C BL BL AR CR CL h CL
AVL Trees (Cont.) • Once rebalancing has been carried out on the subtree in question, examining the remaining tree is unnecessary. • To perform insertion, binary search tree with n nodes could have O(n) in worst case. But for AVL, the insertion time is O(log n).
AVL Insertion Complexity • Let Nh be the minimum number of nodes in a height-balanced tree of height h. In the worst case, the height of one of the subtrees will be h-1 and that of the other h-2. Both subtrees must also be height balanced. Nh = Nh-1 + Nh-2 + 1, and N0= 0, N1 = 1, and N2 = 2. • The recursive definition for Nh and that for the Fibonacci numbers Fn= Fn-1 + Fn-2, F0=0, F1= 1. • It can be shown that Nh= Fh+2 – 1. Therefore we can derive that . So the worst-case insertion time for a height-balanced tree with n nodes is O(log n).
Probability of Each Type of Rebalancing Rotation • Research has shown that a random insertion requires no rebalancing, a rebalancing rotation of type LL or RR, and a rebalancing rotation of type LR and RL, with probabilities 0.5349, 0.2327, and 0.2324, respectively.
Comparison of Various Structures • Doubly linked list and position of x known. • Position for insertion known
2-3 Trees • If search trees of degree greater than 2 is used, we’ll have simpler insertion and deletion algorithms than those of AVL trees. The algorithms’ complexity is still O(log n). • Definition: A 2-3 tree is a search tree that either is empty or satisfies the following properties: (1) Each internal ndoe is a 2-node or a 3-node. A 2-node has one element; a 3-node has two elements. (2) Let LeftChild and MiddleChild denote the children of a 2-node. Let dataL be the element in this node, and let dataL.key be its key. All elements in the 2-3 subtree with root LeftChild have key less than dataL.key, whereas all elements in the 2-3 subtree with root MiddleChild have key greater than dataL.key. (3) Let LeftChild, MiddleChild, and RightChild denote the children of a 3-node. Let dataL and dataR be the two elements in this node. Then, dataL.key < dataR.key; all keys in the 2-3 subtree with root LeftChild are less than dataL.key; all keys in the 2-3 subtree with root MiddleChild are less than dataR.key and greater than dataL.key; and all keys in the 2-3 subtree with root RightChild are greater than dataR.key. (4) All external nodes are at the same level.
2-3 Tree Example A 40 B C 10 20 80
The Height of A 2-3 Tree • Like leftist tree, external nodes are introduced only to make it easier to define and talk about 2-3 trees. External nodes are not physically represented inside a computer. • The number of elements in a 2-3 tree with height h is between 2h - 1 and 3h - 1. Hence, the height of a 2-3 tree with n elements is between and
2-3 Tree Data Structure typedef struct two_three *two_three_ptr; struct two_three { element data_l, data_r; two_three_ptr left_child, middle_child, right_child; };
Searching A 2-3 Tree • The search algorithm for binary search tree can be easily extended to obtain the search function of a 2-3 tree (Search()23). • The search function calls a function compare that compares a key x with the keys in a given node p. It returns the value 1, 2, 3, or 4, depending on whether x is less than the first key, between the first key and the second key, greater than the second key, or equal to one of the keys in node p. Program 10.4: Function to search a 2-3 tree
Insertion Into A 2-3 Tree • First we use search function to search the 2-3 tree for the key that is to be inserted. • If the key being searched is already in the tree, then the insertion fails, as all keys in a 2-3 tree are distinct. Otherwise, we will encounter a unique leaf node U. The node U may be in two states: • the node U only has one element: then the key can be inserted in this node. • the node U already contains two elements: A new node is created. The newly created node will contain the element with the largest key from among the two elements initially in p and the element x. The element with the smallest key will be in the original node, and the element with median key, together with a pointer to the newly created node, will be inserted into the parent of U.
Insertion to A 2-3 Tree Example A A 20 40 40 C B D B C 70 80 10 30 10 20 70 80 (b) 30 inserted (a) 70 inserted
Insertion of 60 Into Figure 10.15(b) 60 80 10 30 G 40 A F 20 70 E B D C
Node Split • From the above examples, we find that each time an attempt is made to add an element into a 3-node p, a new node q is created. This is referred to as a node split. Program 10.5: Insertion into a 2-3 tree (P.501)
Deletion From a 2-3 Tree • If the element to be deleted is not in a leaf node, the deletion operation can be transformed to a leaf node. The deleted element can be replaced by either the element with the largest key on the left or the element with the smallest key on the right subtree. • Now we can focus on the deletion on a leaf node.
Deletion From A 2-3Tree Example A A 50 80 50 80 B C D B C D 90 95 10 20 60 90 95 10 20 60 70 (b) 70 deleted A (a) Initial 2-3 tree 50 80 B C D 95 10 20 60 (c) 90 deleted
Deletion From A 2-3Tree Example (Cont.) A A (e) 95 deleted (d) 60 deleted 20 20 80 B C B C D 10 50 80 95 10 50 A (g) 10 deleted (f) 50 deleted 20 B 20 80 B C 10 80
Rotation and Combine • As shown in the example, deletion may invoke a rotation or a combine operations. • For a rotation, there are three cases • the leaf node p is the left child of its parent r. • the leaf node p is the middle child of its parent r. • the leaf node p is the right child of its parent r.
Three Rotation Cases d d r r r w z y ? x ? p q q p q p x z x y y z a c a d c c b b e b (a) p is the left child of r r r r w y y ? z ? q p q p q p a x z x y x z a d c c a d b c b b e d (b) p is the middle child of r (c) p is the right child of r
Steps in Deletion From a Leaf Of a 2-3 Tree • Step 1: Modify node p as necessary to reflect its status after the desired element has been deleted. • Step 2: while( p has zero elements && p is not the root ) { let r be the parent of p; let q be the left or right sibling of p ( as appropriate ); if( q is a 3-node ) rotate; else combine; p=r; } • Step 3: If p has zero elements, then p must be the root. The left child of p becomes the new root, and node p is deleted.
Combine When p is the Left Child of r r r z x z p p q x y y a c b a c b (a) r r x z z q p p d y x d a a b c b c (b)
M-Way Search Tree Definition: An m-way search tree, either is empty or satisfies the following properties: • The root has at most m subtrees and has the following structures: n, A0, (K1, A1), (K2, A2), …, (Kn, An) where the Ai, 0 ≤ i ≤ n ≤ m, are pointers to subtrees, and the Ki, 1 ≤ i ≤ n ≤ m, are key values. (2) Ki < Ki +1, 1 ≤ i ≤ n (3) All key values in the subtree Ai are less than Ki +1 and greater then Ki , 0 ≤ i ≤ n (4) All key values in the subtree An are greater than Kn , and those in A0 are less than K1. (5) The subtrees Ai, 0 ≤ i ≤ n , are also m-way search trees.
Searching an m-Way Search Tree • Suppose to search a m-Way search tree T for the key value x. Assume T resides on a disk. By searching the keys of the root, we determine i such that Ki ≤ x < Ki+1. • If x = Ki, the search is complete. • If x ≠ Ki, x must be in a subtree Ai if x is in T. • We then proceed to retrieve the root of the subtree Ai and continue the search until we find x or determine that x is not in T.
Searching an m-Way Search Tree • The maximum number of nodes in a tree of degree m and height h is • Therefore, for an m-Way search tree, the maximum number of keys it has is mh - 1. • To achieve a performance close to that of the best m-way search trees for a given number of keys n, the search tree must be balanced.
B-Tree Definition: A B-tree of order m is an m-way search tree that either is empty or satisfies the following properties: • The root node has at least two children. • All nodes other than the root node and failure nodes have at least children. • All failure nodes are at the same level.
B-Tree (Cont.) • Note that 2-3 tree is a B-tree of order 3 and 2-3-4 tree is a B-tree of order 4. • Also all B-trees of order 2 are full binary trees. • A B-tree of order m and height l has at most ml -1 keys. • For a B-tree of order m and height l, the minimum number of keys (N) in such a tree is • If there are N key values in a B-tree of order m, then all nonfailure nodes are at levels less than or equal to l, . The maximum number of accesses that have to be made for a search is l. • For example, a B-tree of order m=200, an index with N ≤ 2x106-2 will have l ≤ 3.
The Choice of m • B-trees of high order are desirable since they result in a reduction in the number of disk accesses. • If the index has Nentries, then a B-tree of order m=N+1 has only one level. But this is not reasonable since all the N entries can not fit in the internal memory. • In selecting a reasonable choice for m, we need to keep in mind that we are really interested in minimizing the total amount of time needed to search the B-tree for a value x. This time has two components: • the time for reading in the node from the disk • the time needed to search this node for x.
The Choice of m (Cont.) • Assume a node of a B-tree of order m is of a fixed size and is large enough to accommodate n, A0 , and m-1 triple (Ki , Ai , Bi), 1 ≤ j < m. • If the Ki are at most charactersα long and Ai and Bi each characters βlong, then the size of a node is about m(α+2β). Then the time to access a node is ts + tl +m(α+2β) tc = a+bm where a = ts + tl = seek time + latency time b = (α+2β) tc , and tc = transmission time per character. • If binary search is used to search each node of the B-tree, then the internal processing time per node is c log2 m+d for some constants c and d. • The total processing time per node is τ= a + bm + c log2 m+d • The maximum search time is where f is some constant.
Figure 10.37: Plot of (35+0.06m)/log2m Total maximum search time 6.8 5.7 50 125 400 m
Insertion into a B-Tree • Instead of using 2-3-4 tree’s top-down insertion, we generalize the two-pass insertion algorithm for 2-3 trees because 2-3-4 tree’s top-down insertion splits many nodes, and each time we change a node, it has to be written back to disk. This increases the number of disk accesses. • The insertion algorithm for B-trees of order m first performs a search to determine the leaf node p into which the new key is to be inserted. • If the insertion of the new key into p results p having m keys, the node p is split. • Otherwise, the new p is written to the disk, and the insertion is complete. • Assume that the h nodes read in during the top-down pass can be saved in memory so that they are not to be retrieved from disk during the bottom-up pass, then the number of disk accesses for an insertion is at most h (downward pass) +2(h-1) (nonroot splits) + 3(root split) = 3h+1. • The average number of disk accesses is approximately h+1 for large m.
Figure 10.38: B-Trees of Order 3 20 10, 30 25, 30 10 (a) p = 1, s = 0 (b) p = 3, s = 1 p is the number of nonfailure nodes in the final B-tree with N entries. 20, 28 (c) p = 4, s = 2 10 10 25, 30 s is the number of split