Download
1 / 11
130 likes | 451 Vues
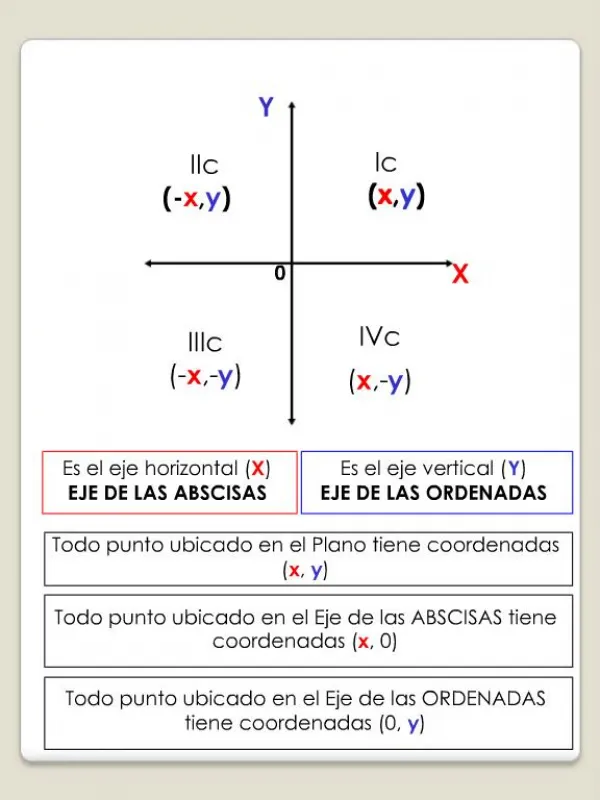
Sistemas de coordenadas de referencia. Sistema de coordenadas de referencia. Para describir una imagen, primero es necesario seleccionar un sistema de coordenadas cartesianas adecuado. Puede ser bidimensional o tridimensional. Una escena 3D.

E N D
Sistema de coordenadas de referencia • Para describir una imagen, primero es necesario seleccionar un sistema de coordenadas cartesianas adecuado. • Puede ser bidimensional o tridimensional
Una escena 3D Después se describen los objetos de la imagen proporcionando sus especificaciones geométricas en términos de la posición dentro de las coordenadas del mundo. Luego los objetos se visualizan pasando la información de la escena a las rutinas de visualización, que identifican las superficies visibles y asignan los objetos a sus correspondientes posiciones en el monitor de video. El proceso de conversión de líneas almacena la información sobre la escena, como por ejemplo los valores de color, en las apropiadas ubicaciones dentro del buffer de la imagen, y los objetos de la escena se muestran en el dispositivo de salida.
Extensión de coordenadas: valores x,y y z mínimos y máximos para cada objeto. • Un conjunto de coordenadas de extensión se denomina recuadro de contorno. • Rectángulo de contorno se denomina para una figura bidimensional.
Coordenadas de pantalla • Las ubicaciones sobre un monitor de video se describen mediante coordenadas de pantalla que son números enteros y que se corresponden con las posiciones de pixel dentro del búfer de la imagen • Empiezan de 0 de la parte superior hacia la inferior y de izquierda a derecha
Especificaciones absolutas y relativas • Coordenadas absolutas: los valores especificados son las posiciones reales dentro del sistema de coordenadas que se este utilizando. • Coordenadas relativas: Especifican una posición de coordenadas en forma de un desplazamiento a partir de la ultima posición a la que se hizo referencia( posición actual).
Especificación de un sistema bidimensional de referencia universal • El comando gluOrtho2D: fija cualquier sistema de referencia bidimensional cartesiano • Los argumentos son los cuatro valores que definen los limites de coordenadas x e y para la imagen que queremos mostrar.
Funciones de punto en OpenGL • glVertex*(); indica los valores de coordenadas para una única posición • Sufijos: para identificar la dimensión espacial, el tipo de datos numérico y una posible forma vectorial para la especificación de coordenadas • glBegin: identifica el tipo de primitiva grafica que hay que visualizar • La constante simbólica GL_POINTS permite especificar la visualización de puntos.
Funciones de punto en OpenGL • Las coordenadas en OpenGL pueden proporcionarse en dos, tres o cuatro dimensiones. • Indicar el tipo de dato que se esta usando para los valores numéricos que especifican las coordenadas. i(integer),s(short), f(float) y d(double) • También puede utilizarse un único argumento que referencie las coordenadas en forma matricial v(vector).
Funciones para líneas en OpenGL • Especificar uno o mas segmentos de líneas, cada segmento esta definido por las coordenadas de los dos extremos. • GL_LINES: constante simbólica para generar segmentos de líneas rectos entre pares sucesivos de puntos de una lista. • GL_LINE_STRIP:crea una secuencia de segmentos de líneas conectados que van desde el primer punto de la lista hasta el último (polilinea)
Funciones para líneas en OpenGL • GL_LINE_LOOP: Genera una polilínea cerrada