Velocità relativa
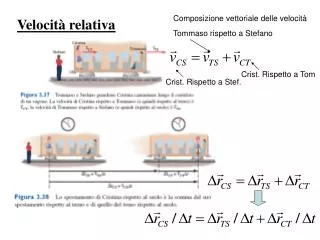
Crist. Rispetto a Stef. Composizione vettoriale delle velocità. Velocità relativa. Tommaso rispetto a Stefano. Crist. Rispetto a Tom. Composizione vettoriale dei vettori posizione e delle velocità. Velocità relativa. S ’. P. S.

Velocità relativa
E N D
Presentation Transcript
Crist. Rispetto a Stef. Composizione vettoriale delle velocità Velocità relativa Tommaso rispetto a Stefano Crist. Rispetto a Tom
Composizione vettoriale dei vettori posizione e delle velocità Velocità relativa S’ P S Se i due sistemi sono in moto rettilineo uniforme relativo uno rispetto all’altro Per 2 Sistemi inerziali = accelerazioni sono le stesse (misuro la stessa accelerazione) 1o principio dinamica è un postulato: un Sist è Inerziale quando Galileo+Newton Principio di Relatività =0
Y X Esempio: Velocità relativa Vel Battello Risp acqua Quale direzione del timone Per attraversare perpendicolarmente Al fiume? Vel acqua Risp sponda Vel Battello Risp sponda Se si vuole che il battello attraversi il fiume perpendicolarmente, VBS deve essere ortogonale alla corrente, quindi non avere componenti lungo y Parte della velocità del battello (la sua componente lungo y) va a compensare la corrente
Y X Esempio: I compitino 2009 Ma anche I comp 2007-2008, I comp 2005-2006 (avv), I comp 2003-2004 (topo) Velocità relativa B C L d A Tratto fiume rettilineo, largo L=5.5 km corrente scorre a vas=4.40 m/s La barca nel fiume viaggia a una velocità (rispetto all’acqua) di vba=9.50 m/s Calcolare: 1) tempo minimo t1 necessario per attraversare il fiume da una sponda all’altra in modo perpendicolare alla corrente (cammino AB) 2) tempo minimo t2 necessario per attraversare il fiume da un punto A ad un punto C qualunque dell’altra sponda 3) La distanza d di C da B lungo l’altra sponda
Y X Esempio: I compitino 2009 Ma anche I comp 2007-2008, I comp 2005-2006 (avv), I comp 2003-2004 (topo) Velocità relativa B C L d A Tratto fiume rettilineo, largo L=5.5 km corrente scorre a vas=4.40 m/s La barca nel fiume viaggia a una velocità (rispetto all’acqua) di vba=9.50 m/s 1) Se devo andare da A a B allora vbs deve essere orientato lungo l’asse y e quindi non avere componenti lungo x Parte della velocità della barca (la sua componente lungo x) va a compensare la corrente, quindi l’orientazione deve essere opportunamente scelta
Y X Esempio: I compitino 2009 Ma anche I comp 2007-2008, I comp 2005-2006 (avv), I comp 2003-2004 (topo) Velocità relativa B C L A Teorema Pitagora Vbs e Vas sono perp
Y X Esempio: I compitino 2009 Ma anche I comp 2007-2008, I comp 2005-2006 (avv), I comp 2003-2004 (topo) Velocità relativa B C d L A 2) tempo minimo t2 necessario per attraversare il fiume da un punto A ad un punto C qualunque dell’altra sponda Non interessa viaggiare in direzione perpendicolare, un punto sull’altra sponda vale l’altro. Allora conviene usare tutta la velocità per attraversare la distanza L. Oriento la barca perpendicolarmente. 3) La distanza di C da B lungo l’altra sponda? Semplice, è la strada percorsa lungo x, alla velocità della corrente durante t2
http://qbx6.ltu.edu/s_schneider/physlets/main/boatriver1.shtmlhttp://qbx6.ltu.edu/s_schneider/physlets/main/boatriver1.shtml http://www.schulphysik.de/suren/Applets/Kinematics/BoatRiver/BoatRiverApplet.html http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/ http://www.educypedia.be/education/physicsjavalabomechanics.htm
U S A Se due sistemi non sono in moto relativo rettilineo uniforme non sono inerziali, le accelerazioni non sono uguali. In apparenza avvertiamo delle forze che in realtà non esistono, è la conseguenza del fatto che uno dei due sistemi non è inerziale Forze apparenti Se F normale dallo schienale (vera)
U S A Se due sistemi non sono in moto relativo rettilineo uniforme non sono inerziali, le accelerazioni non sono uguali. In apparenza avvertiamo delle forze che in realtà non esistono, è la conseguenza del fatto che uno dei due sistemi non è inerziale Forze apparenti Uomo non tocca schienale Se non ha cinture La risultante delle forze non ha Componenti lungo x Se Per es. decelera Uomo continua di moto rettilineo uniforme rispetto al suolo, mentre rispetto all’auto si avverte una forza apparente che spinge l’uomo in avanti
Y Y’ X X’ Forze apparenti Accelerometro, F centrifuga, etc. Camera chiusa che accelera (Tram, treno) P Acc. Costante aS’S=a0 lungo x Dalla inclinazione posso calcolare quanto è l’accelerazione S’ S
Peso apparente Ascensore+bilancia Il peso apparente è la forza A cui si oppone la bilancia con la sua forza normale Peso apparente Se l’ascensore accelera verso l’alto, il peso apparente è maggiore Se verso il basso (ay<0), peso apparente è minore Se si rompe cavo ay=-g il peso apparente è nullo
v0 vc Moto parabolico è composizione Di moto rettilineo uniforme lungo x E moto uniformememte accelerato lungo y
v0x v0x v0x v0y v0x v0x v0x v0x vfy Moto proiettile Al Moto di un grave in 2 D si può ricondurre il caso generale di moto in presenza di forze costanti Moto parabolico è composizione Di moto rettilineo uniforme lungo x e moto uniformememte accelerato lungo y
v0x v0x v0x v0y v0x v0x v0x v0x vfy Moto proiettile Di solito x0=0; se eliminiamo t Traiettoria y(x) Traiettoria parabolica y(x)=ax2+bx+c
Moto proiettile Punto più alto (y max) È come nel caso del corpo Lanciato in verticale Max per =90o Gittata, spazio percorso quando arriva alla stessa altezza (intersezione parabola con retta orizzontale) Max per =45o
Moto proiettile Max per =90o Max per =45o
Moto proiettile Se invece chiedono distanza dell’impatto al suolo rispetto al piede della rampa, e velocità di impatto al suolo, allora l’intersezione va fatta con y=0
Moto proiettile Moto parabolico = composizione di moto rettilineo uniforme lungo x e moto uniformememte accelerato lungo y
Tiro al bersaglio in caduta libera Due corpi in caduta libera Partenza in simultanea Bersaglio parte da fermo proiett target Perché si incontrino Se pende la mira a t=0, allora sono paralleli Unica condizione: tf<tempo di caduta tc
Moto proiettile Moto parabolico = composizione di moto rettilineo uniforme lungo x e moto uniformemente accelerato lungo y http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/ClassMechanics/TwoBallsGravity/TwoBallsGravity.html http://galileoandeinstein.physics.virginia.edu/more_stuff/Applets/ProjectileMotion/itapplet.html www.ateneonline.it/giambattista/ -> areastudenti-> tutorial http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/ Summary: http://www.educypedia.be/education/physicsjavalabomechanics.htm http://www.personal.psu.edu/sac130/courses/phys150/links_150.html http://jersey.uoregon.edu/vlab/Cannon/index.html http://galileoandeinstein.physics.virginia.edu/more_stuff/Applets/ProjectileMotion/itapplet.html http://www.wainet.ne.jp/~yuasa/EngF6.htm QuickTime: http://www.ac.wwu.edu/~vawter/PhysicsNet/QTMovies/QT-Mech-Main.html applet Java: http://qbx6.ltu.edu/s_schneider/physlets/main/index.shtml (http://qbx6.ltu.edu/s_schneider/physlets/main/proj2d01.shtml) (http://qbx6.ltu.edu/s_schneider/physlets/main/boatriver1.shtml) http://www.cs.sbcc.cc.ca.us/~physics/flash/ http://www.phys.hawaii.edu/~teb/java/ntnujava/index.html http://www.schulphysik.de/suren/Applets/Kinematics/BoatRiver/BoatRiverApplet.html Sist riferimento: http://www.phys.unsw.edu.au/einsteinlight/jw/module1_Inertial.htm