Embedded Systems “PIC Microcontroller and Embedded Systems”
Embedded Systems “PIC Microcontroller and Embedded Systems”. Chapter 7: PIC Programming in C. 7.1 Data Type and Time Delays in C. C data types for the PIC18. 7.1 Data Type and Time Delays in C (2). Unsigned char Example 7-1 Write a C18 program to send values 00-FF to Port B Example 7-2

Embedded Systems “PIC Microcontroller and Embedded Systems”
E N D
Presentation Transcript
Embedded Systems“PIC Microcontroller and Embedded Systems” Chapter 7: PIC Programming in C
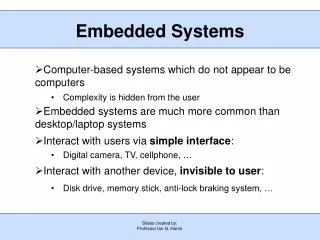
7.1 Data Type and Time Delays in C • C data types for the PIC18 PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (2) • Unsigned char • Example 7-1 • Write a C18 program to send values 00-FF to Port B • Example 7-2 • Write a C18 program to send values for ASCII characters of 0,1,2,3,4,5,A,B,C,D to Port B • Example 7-3 • Write a C18 program to toggle all the bits of Port B continuously PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (3) • Unsigned char (cont’d) • In declaring variables, we must pay careful attention to the size of the data and try to use unsigned char instead of int if possible. • PIC18 microcontrollers have a limited number of registers and data RAM locations. PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (4) • Signed char • If unsigned is not used, the default is the signed value • Example 7-4 • Write a C-18 program to send values -4 to +4 to Port B PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (5) • Unsigned int • The C18 is an 8-bit microcontroller, the int data type takes two bytes of RAM. • Use chars instead of ints when that is possible • Use unsigned instead of signed when that is possible • Signed int .. Other data types • Example 7-5 • Write a C-18 program to toggle all bits of Port B 50,000 times • Example 7-6 • Write a C-18 program to toggle all bits of Port B 100,000 times PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (6) • Time delay • Can be done by: • Using a simple for loop • Using the PIC18 timers • When using the for loops, two factors affect the time delay: • Crystal frequency • Compiler used… • Example 7-7 • Write a C18 program to toggle all the bits of PORT B continuously with a 250 ms delay. Assume that the system has a XTAL = 10 MHz. PIC Microcontroller and Embedded Systems
7.1 Data Type and Time Delays in C (7) • Example 7-8 • Write a C18 program to toggle all the bits of PORT C and PORT D continuously with a 250 ms delay. PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C • Byte size I/O • Example 7-9 • LEDs are connected to bits in Port B and Port C. Write a C18 program that shows the count from 0 to $FF on the LEDs • Example 7-10 • Write a C18 program to get a byte of data from Port B, wait ½ second, and then sent it to Port C • Example 7-11 • Write a C18 program to get a byte of data from Port C. If it is less than 100, send it to Port B; otherwise, send it to Port D. PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (2) • Bit-addressable I/O programming • The ports are bit addressable. We can access a single bit without disturbing the rest of the port. • PORTxbits.Rxy to access the y bit of Port x PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (3) PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (4) • Example 7-12 • Write a C18 program to toggle only bit RB4 continuously without disturbing the rest of the bits of Port B • Example 7-13 • Write a C18 program to monitor bit PC5. If it is HIGH, send 0x55 to Port B; otherwise, send 0xAA to Port D. PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (5) • Example 7-14 • A door sensor is connected to the RB1 pin, and a buzzer is connected to RC7. Write a C18 program to monitor the door sensor, and when it opens, sound the buzzer. You can sound the buzzer by sending a square wave of a few hundred Hz frequency to it. PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (6) • Example 7-15 • The data pins of an LCD are connected to Port B. The information is latched into the LCD whenever its Enable pin goes from HIGH to LOW. Write a C18 program to send a message to this LCD. PIC Microcontroller and Embedded Systems
7.2 I/O Programming in C (7) • Example 7-16 • Write a C18 program to toggle all the bits of Port B, Port C, and Port D continuously with a 250 ms delay. • Example 7-17 • Write a C18 program to turn bit 5 of Port B on and off 50,000 times • Example 7-18 • Write a C18 program to get the status of bit RB0, and send it to RC7 continuously. PIC Microcontroller and Embedded Systems
7.3 Logic Operations in C • Bitwise logic operators in C • Differ from regular logic operators such as &&, II, ! • 0x35 & 0x0F = 0x05 0x04 | 0x68 = 0x6C • 0x54 ^ 0x78 = 0x2C ~0x55 = 0xAA • Bitwise shift operations in C • Shift right (>>): data >> # of bits to shift, 0x9A >> 3 = 0x13 • Shift left (<<): data >> # of bits to shift, 0x6 << 4 = 0x60 PIC Microcontroller and Embedded Systems
7.3 Logic Operations in C (2) • Example 7-19 • Example logic operations • Example 7-20 • Write a C18 program to toggle all the bits of Port B and Port C continuously with a 250 ms delay. Use the inverting operator. • Example 7-21 • Rewrite the C18 program to toggle all the bits of Port B, Port C, and Port D continuously with a 250 ms delay. Use the EX-OR operator • Example 7-22 • Rewrite the C18 program to get bit RB0 and send it to RC7 after inverting it. PIC Microcontroller and Embedded Systems
7.3 Logic Operations in C (3) • Example 7-23 • Write a C18 program to read the RB0 and RB1 bits and issue an ASCII character to PD according to the following table: • RB1 RB0 • 0 0 send ‘0’ to PORTD (ASCII ‘0’ is 0x30) • 0 1 send ‘1’ to PORTD • 1 0 send ‘2’ to PORTD • 1 2 send ‘3’ to PORTD PIC Microcontroller and Embedded Systems
7.4 Data Conversion Programs in C • ASCII numbers • Convert a packed BCD (stored value) to ASCII (Print or display) PIC Microcontroller and Embedded Systems
7.4 Data Conversion Programs in C (2) • Example 7-24 • Write a C18 program to convert packed BCD 0x29 to ASCII and display the bytes on PORTB and PORTC • Example 7-25 • Write a C18 program to convert ASCII digits of ‘4’ and ‘7’ to packed BCD and display it on PORTB PIC Microcontroller and Embedded Systems
7.4 Data Conversion Programs in C (3) • Assume that we have 4 bytes of hexadecimal data: 0x25, 0x62, 0x3F, and 0x52. • A) Find the checksum byte (add the bytes, drop the carries, take the 2’s complement of the total) • 0x25 + 0x62 + 0x3F + 0x52 = 0x118 • Drop carries: 0x18 • 2’s complement: 0xE8 (this is the checksum byte) • B) Perform the checksum operation to ensure data integrity (on the receiver side) (add all bytes including the checksum byte, drop the carries, the result should be 0) • 0x25 + 0x62 + 0x3F + 0x52 + 0xE8 = 0x200 (0 after dropping the carries) • Data is not corrupted PIC Microcontroller and Embedded Systems
7.4 Data Conversion Programs in C (4) • C) If there is an error (0x62 has been changed to 0x22) • 0x25 + 0x22 + 0x3F + 0x52 + 0xE8 = 0x1C0 (0xC0 after dropping the carries) • The final result is not 0, this detects the error. • Example 7-27 • Write a C18 program to calculate the checksum byte for the data given in the example • Example 7-28 • Write a C18 program to perform step B). If the data is good, send ASCII character ‘G’ to PORTD; otherwise, send ‘B’ PIC Microcontroller and Embedded Systems
7.4 Data Conversion Programs in C (5) • Binary (hex) to decimal and ASCII conversion in C18 • Example 7-29 • Write a C18 program to convert 11111101 (0xFD) to decimal and display the digits on PORTB, PORTC, and PORTD PIC Microcontroller and Embedded Systems
7.5 Data Serialization in C • Can be done by using a serial port (dealt with later in the course) or by sending data one bit at a time and control the sequence of data and the spaces between them • Example 7-30 • Write a C18 program to send out the value 0x44 serially one bit at a time via RC0. The LSB should go out first • Example 7-31 • Write a C18 program to send out the value 0x44 serially one bit at a time via RC0. The MSB should go out first. PIC Microcontroller and Embedded Systems
7.5 Data Serialization in C (2) • Example 7-32 • Write a C18 program to bring in a byte of data serially one bit at a time via the RB0 pin. Place the byte on PORTD. The LSB should come in first. • Example 7-33 • Write a C18 program to bring in a byte of data serially one bit at a time via the RB0 pin. The MSB should come in first. PIC Microcontroller and Embedded Systems
7.6 Program ROM Allocation in C18 • RAM data space vs. code data space • In the PIC18 we have two spaces in which to store data • The 4096 bytes of data RAM space with address range 0x000-0xFFF. Many PIC18 chips have much less than 4096 bytes for the file register data RAM • The 2M of code (program) space with addresses of 0x000000 – 0x1FFFFF. This 2M of on-chip ROM space is used for storing programs and thus is directly under the control of the PC. Many PIC18 chips have much less than the 2M. • The more code space is used for data, the less is left for the code itself. • To alleviate this problem, Microchip added an EEPROM to be used for data storage especially for applications that require a large amount of data (look-up tables…. ) PIC Microcontroller and Embedded Systems
7.6 Program ROM Allocation in C18 (2) • PIC18 Program ROM Space PIC Microcontroller and Embedded Systems
7.6 Program ROM Allocation in C18 (3) • Allocating program space to data • In all our C18 examples so far, the data were stored in the data RAM. • It is common practice to use the on-chip program ROM for the purpose of storing fixed data such as strings. This is especially useful since we have limited amount of file register data RAM. • Use the rom keyword to make the compiler use the ROM • Program 7-1 PIC Microcontroller and Embedded Systems
7.6 Program ROM Allocation in C18 (4) • NEAR and FAR for code • Near: ROM: in program space of 0000 – 0xFFFF (64KB) • Far: ROM: in program space of 000000 – 0x1FFFFF (2MB) • Program 7-2A • Program 7-2B PIC Microcontroller and Embedded Systems
7.6 Program ROM Allocation in C18 (5) • Pragma and allocating a fixed address to data and code • Putting code in a specific ROM address • #pragma code “name” = “location” • Program 7-3 • Putting data in a specific ROM address • #pragma romdata “name” = “location” • Program 7-4 PIC Microcontroller and Embedded Systems
7.7 Data RAM Allocation In C18 • RAM data space usage by the C18 compiler • Up to 4K RAM (not all members of the family and some chips quite less). • 128 bytes are used for SFRs and remaining RAM for the scratch pad • Program 7-5 Data RAM space: x, y, z PIC Microcontroller and Embedded Systems
7.7 Data RAM Allocation In C18 (2) • Program 7-6 • Program 7-7 PIC Microcontroller and Embedded Systems
7.7 Data RAM Allocation In C18 (3) • NEAR and FAR for data • Near: RAM: In access bank • Far: RAM: Anywhere in data RAM file register (default) • Program 7-8A • Program 7-8B • Putting data in a specific RAM address • #pragma idata for initialized data • Program 7-9 • #pragma udata for uninitialized data • Program 7-10 • Using both • Program 7-11 PIC Microcontroller and Embedded Systems