Download
1 / 48
530 likes | 944 Vues
This resource delves into the geometric relationships between image points and scene measurements, focusing on geometric camera models. It covers key concepts, including homogeneous coordinates, geometric transformations, and both intrinsic and extrinsic camera parameters. The content explores analytical Euclidean geometry, rigid transformations, and camera calibration, illustrating how various models like orthographic and affine projections map real-world coordinates to camera coordinates. This foundational knowledge is essential for applications in computer vision and image processing.

E N D
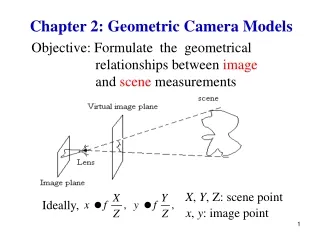
Objective: Formulate the geometrical relationships between image and scene measurements Chapter 2: Geometric Camera Models X, Y, Z: scene point Ideally, x, y: image point
Contents: (i) Homogeneous coordinates (ii) Geometric transformations (iii) Intrinsic and extrinsic camera parameters (iv) Affine projection models 2.1. Elements of Analytical Euclidean Geometry 2.1.1. Coordinate Systems ○ Right-handed coordinate system
O: origin; : basis vectors coordinates of point P : position vectorof point P
◎ Homogeneous Coordinates Advantages: (a) Some nonlinear systems can be transformed into linear ones (b) Equations written in terms of homogeneous coordinates become more compact. (c) A transformation, comprising rotation, translation, scaling, and perspective projection, can be written in a single matrix
○ Point: or ○ Plane equation: where
○ Sphere equation: where
2.1.2 Coordinate System Changes and Rigid Transformations Two subjects: (a) Coordinate system changes (b) Rigid transformations Consider two coordinate systems, A and B
○ Coordinate System Changes Position vectors: Coordinate transformation: (?)
○Rigid Transformations 。Translation vector : the vector translates the origin of coordinate system A to that of system B
。Rotation matrix : the 3 by 3 matrix rotates coordinate system A to coincide with system B
The 1st column of is formed by projecting onto The columns of form frame A described in terms of frame B is formed by projecting The 1st row of onto The rows of form frame B described in terms of frame A
* Properties: (a) : unitary matrix (b) (c) orthonormal matrices (d) ○ Rigid Transformation: A rigid transformation preserves: (1) the distance between two points (2) the angle between two vectors
Proof: Let (1) Distance preservation be two points in frame A be their corresponding points in frame B, i.e., Then,
○ Matrices can be multiplied in blocks then ○ ○ In homogeneous coordinates: -- (2.7) where
2.2 Camera Parameters 。 Intrinsic parameters-- Relate the actual camera coordinate system to the idealized camera coordinate system (1) the focal length of the lens f (2) the size and shape of the pixels (3) the position of the principal point (4) the angle between the two image axes Idealized camera Actual camera
。 Extrinsic parameters-- Relate the camera coordinate system to a real world coordinate system (1) translation and (2) rotation parameters Real world Coordinate system Camera coordinate system 。Camera calibration -- estimates the intrinsic and extrinsic parameters of a camera
2.2.1. Intrinsic parameters : scale : skew parameters : shift Start with ideal perspective projection equations 19
○ The relationship between the physical image frame and the normalized one
(Only if) – If , A: nonsingular A can always be factorized into Q: orthonormal matrix L : right upper triangular matrix
Compared with L, K : right upper triangular matrices Q, : orthonomal matrices : vectors W is a perspective projection matrix
2.3. Affine Projection Models • Orthographic Projection Models • -- Objects are far from the camera • Parallel Projection Models • -- Objects are far and lie off the optical axis • of the camera
Weak Perspective Projection Models • -- Objects lie on the optical axis and their reliefs • are ignored \, • Paraperspective Projection Models • -- Objects lie near the optical axis
Consider object reliefs in weak perspective projection