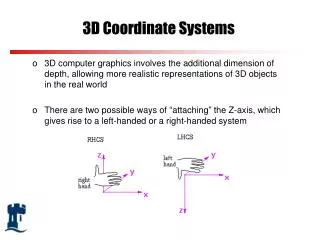
The 3D coordinate system
The 3D coordinate system. Distance formula The distance | P 1 P 2 | between the points P 1 ( x 1 , y 1 , z 1 ) and P 2 ( x 2 , y 2 , z 2 ) is . The 3D coordinate system. Mid-point of a line segment

The 3D coordinate system
E N D
Presentation Transcript
The 3D coordinate system Distance formula The distance |P1P2| between the points P1(x1, y1, z1) and P2(x2 , y2 , z2) is
The 3D coordinate system Mid-point of a line segment Let L be a line segment with end points P1(x1, y1, z1) and P2(x2 , y2 , z2), then the coordinates of its midpoint are
Equation of a Sphere An equation of a sphere with center at the origin and radius r is An equation of a sphere with center at (a, b, c) and radius r is (x – a)2 + (y – b)2 + (z – c)2 = r2
Vectors Definition A vector is a physical quantity that has both magnitude and direction. Remark: Two vectors u and v are considered to be equal if they have the same direction and magnitude. In particular, the “position” of a vector is unimportant. The zero vector 0 is the special vector that has 0 magnitude and no direction.
Notations Through out this course, vectors will be denoted by bold face Italic letters such as u, v, and w. Scalars will be denoted by light face Italic letters such as a, b, and c.
Addition of vectors If u and v are vectors positioned in such a way that the initial point of v coincides with the terminal point of u, then the sum u + v is defined to be the vector from the initial point of u to the terminal point of v. u + v v u
Scalar Multiplication • If c is a scalar and v is a vector, then the scalar multiple cv is the vector whose length is |c| times the length of v and whose direction is • the same as v if c > 0 • opposite to v if c < 0
Given a point P with coordinates (a1, a2, a3), the positionvectorOP is the vector pointing from the origin to the point P. The component form of OP is therefore a1, a2, a3 Components of a vector If the vector vstarts at (x, y, z) and terminates at (x + a1, y + a2, z + a3), then the component form of v is a1, a2, a3 Unit vectors are vectors whose lengths are 1 unit. Three special unit vectors are i = 1, 0, 0 , j = 0, 1, 0 , k = 0, 0, 1 Hence any vector v = a1, a2, a3 can be written as v = a1 i + a2 j + a3 k
2 2 2 = + + u a a a ( ) ( ) ( ) 1 2 3 Addition of vectors in component form If u = a1, a2, a3 and v = b1, b2, b3, then u + v = a1 + b1, a2 + b2, a3 + b3 Scalar Multiplication If c is a scalar and u = a1, a2, a3 is a vector, then cu = ca1, ca2, ca3 Magnitude of a vector If u = a1, a2, a3 is a vector, then its magnitude is
Properties of Vectors • If u, v, w, are vectors in 3, and c and d are scalars, then • u + v = v + u • u + (v + w) = (u + v) + w • u + 0 = u • u + (- u) = 0 • c(u + v) = cu + cv • (c + d)u = cu + du • (cd)u = c(du) • 1u = u
Direction cosines of a vector Given a vector v = a, b, c, then its direction is determined by 3 angles, namely angle : the angle between v and the x direction angle : the angle between v and the y direction angle : the angle between v and the z direction (all these angles have measures between 0o and 180o)and we have the following relations,
The Dot Product Geometrical definition If u = a1, a2, a3 and v = b1, b2, b3 are vectors, then their dot product is defined to be u· v = |u||v|cos where is the angle between u and v. Algebraic definition If u = a1, a2, a3 and v = b1, b2, b3 are vectors, then their dot product is defined to be u· v = a1b1 + a2 b2 + a3 b3 Remark: The algebraic definition allows the dot product to be defined on vector spaces of higher dimensions.
The angle between two vectors u and vcan be computed by the formula Corollary Two vectors u and v are orthogonal if and only if u· v = 0 Two vectors u and v are in the same direction if and only if u· v = |u||v|
Properties of the Dot Product • If u, v, w are vectors in 3, and c is a scalar, then • u· u = |u|2 • u· v = v· u • u· (v + w) = (u· v) + (u· w) • (cu) · v = c(u· v) = u· (cv) • 0· u = 0
v proju(v) u Projections Let u and v be two vectors in the same space, then the vector projection of v onto u is
On Jan 24, 2006, a 1994 Cessna Citation V twin-engine jet coming from Hailey, Idaho, near the resort community of Sun Valley, around 6:40 a.m. skidded off the end of Runway 24 at Palomar airport killing 4 on board. Strong Santa Ana wind was blowing from the east that morning and the pilot chose the wrong runway of land with the wind. The plane touched down beyond the midpoint of the runway and did not have enough distance to stop because of the excessive ground speed.
Cross Product DefinitionGiven two vectors u = a1, a2, a3 and v = b1, b2, b3 in 3D space, the cross product of u and v is the vector u × v = a2 b3−a3 b2 , a3 b1 − a1 b3 , a1 b2 − a2 b1 If this is hard to remember, we can use the determinant form
Geometric definition of the cross product If (between 0 and ) is the angle between u and v, then |u × v| = |u||v|sin i.e. the magnitude is the area of the parallelogram form by the vectors u and v. v u The direction of u×v is perpendicular to both u and v and is determined by the right-hand rule.
Definition Two vector are said to be parallel if the angle between them has measure equal to 0 or . Theorem Two vectors u and v in 3D space are parallel if and only if u × v = 0 = v × u An easier way to check that two vectors are parallel is to check whether one is a scalar multiple of another. Remark The cross product is only defined for vectors in 3D space, It cannot be extended to higher dimensional spaces.
Properties of the Cross product • Theorem • If u, v, w are vectors in 3D space and c is a scalar, then • u × v = - v × u • (cu) × v = c(u × v) = u × (cv) • u × (v + w) = u × v + u × w • (u + v) × w = u × w + v × w • u · (v × w) = (u × v) · w • u × (v × w) = (u · w)v – (u · v)w
The scalar triple product Given three vectors u, v, w in 3D space, the product u · (v × w)( or = (u × v) · w ) is called the triple product (also called the box product) of the three vectors. The geometrical meaning is that | u · (v × w) | = the volume of the parallelopiped form by the three vectors u, v, and w. parallelopiped
Corollary Three vectors u, v, w in 3D space are coplanar (i.e. lying on the same plane if they start from the same point) if and only if u · (v × w) = 0
Equations of Lines and Planes A line is a 1 dimensional object in space, hence it should have only 1 variable, but we need two points to specify its position and also direction. We will start with a line segment with two given end points.
Vector equation of a line segment from a point r0 to another point r1 is r(t) = (1 – t)r0 + tr1 where t ranges from 0 to 1. r0 r1
Vector equation of a line passing through two pointsr0 and r1 is r(t) = (1 – t)r0 + tr1 where t ranges from -∞ to ∞. r0 r1
Vector Equation of a Line Suppose that v is a direction vector of the line, r0 is the position vector of a given point on the line, then the position vector r of a generic point on the line is r = r0+ tv where t is the parameter that ranges from -∞ to ∞ tv r0 r
Parametric Equations of a Line Suppose that the direction vector in the previous equation is v = a, b, c, and r = xo, yo, zo, then the position of a generic point on the line can be specified by the following set of equations x = xo + at, y = yo + bt, z = zo + ct where t isparameter (variable).
Symmetric Equations of a Line If we eliminate the parameter t from the previous set of parametric equations, we then get another set of equations for the same line, And we call a, b, c, the direction numbers of this line because they are the components of a direction vector for this line. Remark: This type of equations requires that all direction numbers to be non-zero.
Definition Two lines in the 3D space is said to be a pair of skew lines if they are not parallel and they do not intersect (hence they cannot lie on the same plane). Remark Two lines are parallel if and only of they have direction vectors that are scalar multiples of each other.
Three point form Suppose we are given 3 points P(a1, b1, c1), Q(a2, b2, c2), and R(a3, b3, c3) on a plane, and if W(x, y, z) is also a point on the plane, then clearly the vectors PQ, PR, and PW are coplanar. i.e. (PQ × PR) · PW = 0 i.e. ( a2 – a1, b2 – b1, c2 – c1 × a3 – a1, b3 – b1, c3 – c1 ) · x– a1, y – b1, z– c1 = 0 Planes A plane is a 2 dimensional object in space and hence its equation should have 2 parameters, and we need 3 (non-colinear) points to completely specify a plane.
Normal vectors of a plane A plane W does not have a direction, but it is perpendicular to two (opposite) directions in the sense that “there are two unit vectors n and –n that are perpendicular to any vector v lying on the plane W”. These two vectors are called (unit) normal vectors to the plane W.
Useful criteria • Two planes are parallel if and only if they have parallel normal vectors. • Two planes are perpendicular if and only if they have perpendicular normal vectors.
Vector Equation of a plane If n = a, b, c is a normal vector (not necessary of unit length) of a plane and P(x0, y0, z0) is a point on the plane, then an equation for the plane is n · x – x0, y – y0, z – z0 = 0 or a(x – x0 ) + b(y – y0) + c(z – z0) = 0 Linear equation of a plane If we rearrange the terms in the above equation, it will change to the form ax + by + cz + d = 0 where d = -(ax0 + by0 + cz0)
x y z + + = 1 a b g More on Linear Equations • Suppose that we are given a linear equation • ax + by + cz + d = 0 • for a plane, then • a, b, c will be a normal vector to the plane • if a≠ 0, then -d /a is the x-intercept of the plane • if b ≠ 0, then -d /b is the y-intercept of the plane • if c ≠ 0, then -d /c is the z-intercept of the plane Conversely, if we know that the intercepts of the plane are α, β, andγrespectively, then an equation for the plane is provided that α, β, andγ are all non-zero.
Lines from Planes It is not hard to see that any two non-parallel planes will intersect and their intersection must be a line. Hence a line can be specified by the equations of two (non-parallel) planes. a1x + b1y + c1z + d1 = 0 a2x + b2y + c2z + d2 = 0 A direction vector for this line can be computed by v = a1, b1, c1 × a2, b2, c2
Distance Dfrom a point P1(x1, y1, z1) to the planeax + by + cz + d = 0 is given by the formula
Some Typical Problems • Given a line L and a point P not on the line, find the equation of the line L2 that passes through P and runs parallel to L. • Given a line L and a point P not on L, find the shortest distance from P to L. • Find the minimum distance between two given parallel lines.
Some Typical Problems • Given two intersecting planes and a point P not on any of these two planes, find an equation of the line that passes through P and runs parallel to the intersection of the two planes. • Given a plane W and a point P not on W, find the shortest distance from P to W. • Given a plane W and a point P not on W, find an equation for the plane W2 that passes through P and is parallel to W.
Some Typical Problems • Find the shortest distance between two given parallel planes. • Given a line L and a point P not on L, find an equation for the plane containing P and L. • Find the shortest distance between two given skew lines.