
Abstract
E N D
Presentation Transcript
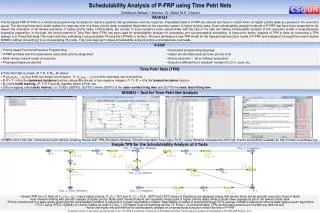
Abstract Priority-based FRP (P-FRP) is a functional programming formalism for reactive systems that guarantees real-time response. Preempted tasks in P-FRP are aborted and have to restart when no higher priority tasks are present in the execution queue. The abort and eventual restart makes the response time of a lower priority tasks completely dependent on the execution pattern of higher priority tasks. Exact schedulability analysis methods of P-FRP that have been presented so far require the evaluation of all release scenarios of higher priority tasks. Unfortunately, the number of such scenarios scale exponentially with the size of the task set making schedulability analysis of this execution model a computationally expensive proposition. In the past, the formal method of Time Petri Nets (TPN) has been used for schedulability analysis for preemptive and non-preemptive scheduling. In these prior works, analysis of TPN is done by converting a TPN network to a Timed Automata (TA) model and then evaluating it using available TA tools like UPPAAL or HyTech. We have developed a new TPN model for the transactional execution model of P-FRP and evaluated it through the model checker ROMEO without converting it to a corresponding TA model. This novel approach makes schedulability analysis simple and entails less overheads. P-FRP Time Petri Nets (TPN) Schedulability Analysis of P-FRP using Time Petri NetsChaitanya Belwal ( Advisor. Dr. Albert M.K. Cheng) • A Time Petri Net is a tuple (P, T, B, F, MO, SI) where: • P={p1,p2,p3,…,pn} is a finite non-empty set of places; T= {t1,t2,t3,…,tn} is a finite nonempty, set of transitions • B: P x T N is the backward incidence function; where N is the set of non-negative integers; F: T x P N is the forward incidence function • MOis the initial marking(P, T, B, F and MOtogether define a Petri net) • SI is a mapping called static interval, tT,SI(t)= [SEFT(t), SLFT(t) ], where SEFT(t) is the static earliest firing timeand SLFT(t) the static latest firing time ROMEO – Tool for Time Petri Net Analysis ROMEO GUI. From left: Initial Screen with Options, Drawing Screen with TPN, Simulation Window, Timed Computation Tree Logic (TCTL) Query Window. Developed by IRCCyN, France and publicly available at: http://romeo.rts-software.org/ Simple TPN for the Schedulability Analysis of 2 Tasks • Simple TPN for a 2-Task set 2 = {1, 2}. 2 has a higher priority; T2,C2 = 10,3 and T1, C1 = 12,4; SEFT and LEFT values of transitions are assigned values that denote these arrival periods/ execution times of tasks • Sub-network dealing with periodic release of higher priority tasks used; Several tokens can represent unique jobs of higher priority tasks, while a single token represents job of the lowest priority task • TPN is transformed to a state-space graph and the schedulability problem is reduced to a graph reachability problem; Reachability of states is analyzed through TCTL queries. ROMEO implement efficient state space search algorithms • TCTL query EF[13,13](M(8)=0) checks if place at index 8 (‘Tau_1_Complete’) has no markings at time 13. If true 1 is unschedulable; TPN can be easily scaled up to handle any task set size • Novel and highly efficient method for schedulability analysis of a transactional execution model like that of P-FRP A modified version of this poster was presented at the 17th IEEE International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA) WiP Session, 2011


















