
Comparative Analysis of Classification Techniques for Motion Recognition in Prosthetic Control
This study examines the effectiveness of various classification techniques in recognizing motion patterns for controlling powered upper-limb prostheses. The comparison includes techniques such as Artificial Neural Networks (ANN), Gaussian Mixture Models (GMM), K-Nearest Neighbors (KNN), Linear Discriminant Analysis (LDA), Multiple Binary Classifier (MBC), Quadratic Discriminant Analysis (QDA), and Support Vector Machines (SVM). Results focus on average accuracy across motion classes collected from both nondisabled subjects and transradial amputees, highlighting the potential for improved prosthetic control.

Comparative Analysis of Classification Techniques for Motion Recognition in Prosthetic Control
E N D
Presentation Transcript
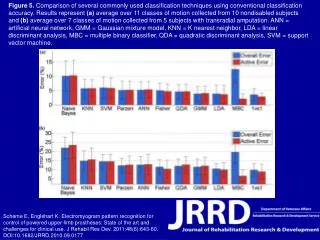
Figure 5. Comparison of several commonly used classification techniques using conventional classification accuracy. Results represent (a) average over 11 classes of motion collected from 10 nondisabled subjects and (b) average over 7 classes of motion collected from 5 subjects with transradial amputation. ANN = artificial neural network, GMM = Gaussian mixture model, KNN = K nearest neighbor, LDA = linear discriminant analysis, MBC = multiple binary classifier, QDA = quadratic discriminant analysis, SVM = support vector machine. Scheme E, Englehart K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J Rehabil Res Dev. 2011;48(6):643-60.DOI:10.1682/JRRD.2010.09.0177