Download
1 / 28
290 likes | 647 Vues
Design of the New Handy Board for Robotics Using the NI LabVIEW Embedded Module for ADI Blackfin Processor. Fred Martin, Assistant Professor, Computer Science Eric Morrison, Undergrad, Electrical Engineering University of Massachusetts Lowell. Overview.

E N D
Design of the New Handy Board for Robotics Using the NI LabVIEW Embedded Module for ADI Blackfin Processor Fred Martin, Assistant Professor, Computer Science Eric Morrison, Undergrad, Electrical Engineering University of Massachusetts Lowell
Overview • Brief history of educational robot control boards • The Blackfin Handy Board hardware • BF-HB LabVIEW VIs • LabVIEW starter projects for an undergrad mobile robotics course • The future
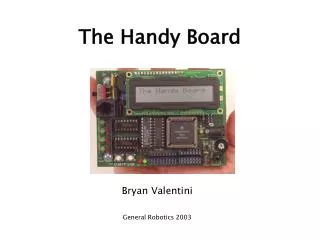
The Original Handy Board • Developed for MIT LEGO Robot Design Competition (1991) • Goal: Give students everything they need to start building robots • 2 MHz Motorola 68HC11 • 32,768 bytes of RAM • 4 motor outs • 7 analog, 9 digital sensor inputs • Built-in battery pack; LCD screen • Interactive C language • Open-source design; over 10,000 in use
More Influential Robot Control Boards (A biased history – dates approximate) • Mini Board (1988) • Handy Board (1991) • Parallax Basic Stamp (1990s) • MIT Crickets (1990s) • LEGO Mindstorms RCX (1998) Note #1 – Whole concept of single-board computer for robots was once new! Note #2 – All make entire robot system design easy— including sensors, actuators, and programming
Design Goals for the Blackfin Handy Board • Expose power of ADI Blackfin processor – a 16-bit DSP + 32-bit RISC core • Build a cool set of robot-friendly I/O onto a single board • Keep what made the original HB successful: • All-in-one solution • Good in the classroom • Low threshold, high ceiling
600 MHz ADI BF ’537, 64 MB SDRAM, 256 MB NAND flash, 1 MB boot flash Xilinx Spartan 3E FPGA, end-user-programmable, with “board support package” 4 DC motor outs (12v, 1A) and 8 servo motor outs LCD screen, buttons, knob, speaker, DAC 12-bit ADCs with 12 external analog ins, integral 2-axis accel, 8 digital ins 8 digital outs; i2c interface Blackfin PPI port for Omnivision CMOS cam Integral 12v, 2 AH batt pack, batt charger, 5v, 5A p/s ADI “Debug Agent”; 10/100 Ethernet; RS-232 serial Blackfin Handy Board Feature Set
LabVIEW Toolkit for the Blackfin Handy Board • Expose all of the BF-HB’s cool features to LabVIEW users • Leverage the NI LabVIEW Embedded Module for ADI Blackfin Processors
DC Motor Outputs • Choose Sign/Magnitude PWM or Locked Antiphase modes with motor enable VI • Set motor power and direction • Disable motor output
Back EMF Motor Sensing • Reports motor velocity from any DC motor
Servo Motor Control • Individually enable and disable servo motor outputs • Establish servo motor setpoint • Report previously-established setpoint
Analog Inputs • Read external input • Read accelerometer channel • Read knob • Read battery level
Sonar Decoding • Use low-cost ultrasonic sensors for distance sensing • Up to 8 sonars; each requires one digital in and one digital out
Shaft Encoder Tracking on Digital Inputs • FPGA-based quadrature shaft decoding • Report position and velocity
Digital Outputs • Set, clear, or toggle output bits • Report value of output bit
LCD Screen • Display messages on BF-HB’s built-in LCD screen
User LEDs • Control any/all of the 4 user LEDs
User Buttons • Report press and release for user “Start” and “Stop” buttons • There’s also a user knob in the analog palette
Sample Projects for Mobile Robots Course • Light avoidance & attraction (Braitenberg-style) • Obstacle avoidance • Line-following • Sonar space-seeking • Subsumption
Subsumption Architecture • Control architecture for mobile robots developed by Rodney Brooks in the mid-1980s • Layered approach where advanced competencies build upon or override primitive ones • Our implementation includes object avoidance, dark avoidance, and random explore From Dautenhahn/Coles, 2001
The Future • First LabVIEW Embedded mobile robotics course will be run in Fall 2006 semester; courseware online • Blackfin Handy Board and LabVIEW Toolkit will be available to public also in fall 2006 – sign up for info at www.cs.uml.edu/blackfin • Questions?