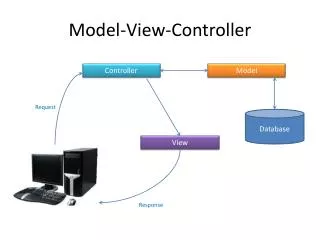
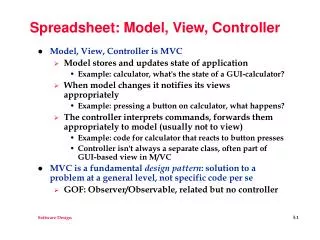
Walking Controller for Musculoskeletal Human Model
170 likes | 311 Vues
Walking Controller for Musculoskeletal Human Model. Biped Control is Difficult. Balance, Robustness, Looking natural Various stylistic gaits. ASIMO Honda. HUBO KAIST. PETMAN Boston Dynamics. Biped Control is Difficult?. da Silva et al. 2008a,b. Yin et al. 2007. Sok et al. 2007.

Walking Controller for Musculoskeletal Human Model
E N D
Presentation Transcript
Biped Control is Difficult • Balance, Robustness, Looking natural • Various stylistic gaits ASIMO Honda HUBO KAIST PETMAN Boston Dynamics
Biped Control is Difficult? da Silva et al. 2008a,b Yin et al. 2007 Sok et al. 2007 Wang et al. 2009 Muico et al. 2009
Biped Control is Difficult? da Silva et al. 2008a,b Yin et al. 2007 Sok et al. 2007 Wang et al. 2009 Coros et al. 2010 Lee et al. 2010 Lasa et al. 2010 Muico et al. 2009 Wu et al. 2010 Liu et al. 2010
Musculoskeletal Model • In biomechanics, musculoskeletal model have been used to analyze, simulate human movement • More similar to human: investigate “how real human moves” • Medical application : orthopedics surgery
Goal • Controller for musculoskeletal model • Responding to perturbation • Reasonable computation time
Related Work • Biomechanical model • Torso [Zordan 2004], neck [Lee 2006], hand [Tsang 2005], face [Sifakis 2005] • Deformable foot model • [Jain 2011], [Pauly 2004] • Musculoskeletal simulation • [Thelen 2003;2006] [Lee 2006;2009] [Tsang 2005] [Sifakis 2005] [Komura 2000]
Hill-Type Muscle Model • Serial element : tendon • Contractile element • Parallel element pennation angle α
Hill-Type Muscle Model • Force-length relation of tendon • Active force-length relation of muscle • Passive force-length relation of muscle • Force-velocity relation of muscle
Activation / Excitation • Activation : level of activation of muscle fiber (contractile element) • Excitation : electrical stimulus (neural signal)
Dynamics of Musculoskeletal System • Activation dynamics
Dynamics of Musculoskeletal System • Activation dynamics • Contraction dynamics
Dynamics of Musculoskeletal System • Activation dynamics • Contraction dynamics • Forward dynamics (equations of motion)
Our Model • 23 degrees of freedom • 66 muscles • Joint limit force • Use OpenSim for musculoskeletal dynamics and Hill-type muscle model
Computing Muscle Force • : joint torques, n : # of dof • : muscle forces, m : # of muscle • : moment arm matrix • Resolve redundancy of muscle force • Minimum norm solution by pseudo inverse • f_min < f < f_max • Optimization