Download
1 / 84
850 likes | 1.11k Vues
Abduction, Uncertainty, and Probabilistic Reasoning. Chapters 13, 14, and more. Introduction. Abduction is a reasoning process that tries to form plausible explanations for abnormal observations Abduction is distinct different from deduction and induction Abduction is inherently uncertain

E N D
Abduction, Uncertainty, and Probabilistic Reasoning Chapters 13, 14, and more
Introduction • Abduction is a reasoning process that tries to form plausible explanations for abnormal observations • Abduction is distinct different from deduction and induction • Abduction is inherently uncertain • Uncertainty becomes an important issue in AI research • Some major formalisms for representing and reasoning about uncertainty • Mycin’s certainty factor (an early representative) • Probability theory (esp. Bayesian networks) • Dempster-Shafer theory • Fuzzy logic • Truth maintenance systems
Abduction • Definition (Encyclopedia Britannica): reasoning that derives an explanatory hypothesis from a given set of facts • The inference result is a hypothesis, which if true, could explain the occurrence of the given facts • Examples • Dendral, an expert system to construct 3D structure of chemical compounds • Fact: mass spectrometer data of the compound and the chemical formula of the compound • KB: chemistry, esp. strength of different types of bounds • Reasoning: form a hypothetical 3D structure which meet the given chemical formula, and would most likely produce the given mass spectrum if subjected to electron beam bombardment
Medical diagnosis • Facts: symptoms, lab test results, and other observed findings (called manifestations) • KB: causal associations between diseases and manifestations • Reasoning: one or more diseases whose presence would causally explain the occurrence of the given manifestations • Many other reasoning processes (e.g., word sense disambiguation in natural language process, image understanding, detective’s work, etc.) can also been seen as abductive reasoning.
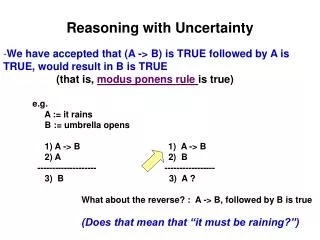
Comparing abduction, deduction and induction A => B A --------- B Deduction: major premise: All balls in the box are black minor premise: These balls are from the box conclusion: These balls are black Abduction: rule: All balls in the box are black observation: These balls are black explanation: These balls are from the box Induction: case: These balls are from the box observation: These balls are black hypothesized rule: All ball in the box are black A => B B ------------- Possibly A Whenever A then B but not vice versa ------------- Possibly A => B Induction: from specific cases to general rules Abduction and deduction: both from part of a specific case to other part of the case using general rules (in different ways)
Characteristics of abduction reasoning • Reasoning results are hypotheses, not theorems (may be false even if rules and facts are true), • e.g., misdiagnosis in medicine • There may be multiple plausible hypotheses • When given rules A => B and C => B, and fact B both A and C are plausible hypotheses • Abduction is inherently uncertain • Hypotheses can be ranked by their plausibility if that can be determined • Reasoning is often a Hypothesize- and-test cycle • hypothesize phase: postulate possible hypotheses, each of which could explain the given facts (or explain most of the important facts) • test phase: test the plausibility of all or some of these hypotheses
One way to test a hypothesis H is to query if some thing that is currently unknown but can be predicted from H is actually true. • If we also know A => D and C => E, then ask if D and E are true. • If it turns out D is true and E is false, then hypothesis A becomes more plausible (support for A increased, support for C decreased) • Alternative hypotheses compete with each other (Okam’s razor) • Reasoning is non-monotonic • Plausibility of hypotheses can increase/decrease as new facts are collected (deductive inference determines if a sentence is true but would never change its truth value) • Some hypotheses may be discarded/defeated, and new ones may be formed when new observations are made
Source of Uncertainty • Uncertain data (noise) • Uncertain knowledge (e.g, causal relations) • A disorder may cause any and all POSSIBLE manifestations in a specific case • A manifestation can be caused by more than one POSSIBLE disorders • Uncertain reasoning results • Abduction and induction are inherently uncertain • Default reasoning, even in deductive fashion, is uncertain • Incomplete deductive inference may be uncertain
Probabilistic Inference • Based on probability theory (especially Bayes’ theorem) • Well established discipline about uncertain outcomes • Empirical science like physics/chemistry, can be verified by experiments • Probability theory is too rigid to apply directly in many knowledge-based applications • Some assumptions have to be made to simplify the reality • Different formalisms have been developed in which some aspects of the probability theory are changed/modified. • We will briefly review the basics of probability theory before discussing different approaches to uncertainty • The presentation uses diagnostic process (an abductive and evidential reasoning process) as an example
Probability of Events • Sample space and events • Sample space S: (e.g., all people in an area) • Events E1 S: (e.g., all people having cough) E2 S: (e.g., all people having cold) • Prior (marginal) probabilities of events • P(E) = |E| / |S| (frequency interpretation) • P(E) = 0.1 (subjective probability) • 0 <= P(E) <= 1 for all events • Two special events: and S: P() = 0 and P(S) = 1.0 • Boolean operators between events (to form compound events) • Conjunctive (intersection): E1 ^ E2 ( E1 E2) • Disjunctive (union): E1 v E2 ( E1 E2) • Negation (complement): ~E (E = S – E) C
~E E1 E E2 E1 ^ E2 • Probabilities of compound events • P(~E) = 1 – P(E) because P(~E) + P(E) =1 • P(E1 v E2) = P(E1) + P(E2) – P(E1 ^ E2) • But how to compute the joint probability P(E1 ^ E2)? • Conditional probability (of E1, given E2) • How likely E1 occurs in the subspace of E2
Independence assumption • Two events E1 and E2 are said to be independent of each other if (given E2 does not change the likelihood of E1) • Computation can be simplified with independent events • Mutually exclusive (ME) and exhaustive (EXH) set of events • ME: • EXH:
Bayes’ Theorem • In the setting of diagnostic/evidential reasoning • Know prior probability of hypothesis conditional probability • Want to compute the posterior probability • Bayes’ theorem (formula 1): • If the purpose is to find which of the n hypotheses is more plausible given , then we can ignore the denominator and rank them use relative likelihood
can be computed from and , if we assume all hypotheses are ME and EXH • Then we have another version of Bayes’ theorem: where , the sum of relative likelihood of all n hypotheses, is a normalization factor
Probabilistic Inference for simple diagnostic problems • Knowledge base: • Case input: • Find the hypothesis with the highest posterior probability • By Bayes’ theorem • Assume all pieces of evidence are conditionally independent, given any hypothesis
The relative likelihood • The absolute posterior probability • Evidence accumulation (when new evidence discovered)
Assessment of Assumptions • Assumption 1: hypotheses are mutually exclusive and exhaustive • Single fault assumption (one and only hypothesis must true) • Multi-faults do exist in individual cases • Can be viewed as an approximation of situations where hypotheses are independent of each other and their prior probabilities are very small • Assumption 2: pieces of evidence are conditionally independent of each other, given any hypothesis • Manifestations themselves are not independent of each other, they are correlated by their common causes • Reasonable under single fault assumption • Not so when multi-faults are to be considered
Limitations of the simple Bayesian system • Cannot handle well hypotheses of multiple disorders • Suppose are independent of each other • Consider a composite hypothesis • How to compute the posterior probability (or relative likelihood) • Using Bayes’ theorem
B: burglar E: earth quake A: alarm set off E and B are independent But when A is given, they are (adversely) dependent because they become competitors to explain A P(B|A, E) <<P(B|A) but this is a very unreasonable assumption • Cannot handle causal chaining • Ex. A: weather of the year B: cotton production of the year C: cotton price of next year • Observed: A influences C • The influence is not direct (A -> B -> C) P(C|B, A) = P(C|B): instantiation of B blocks influence of A on C • Need a better representation and a better assumption
Bayesian Belief Networks (BNs) • Definition: BN = (DAG, CPD) • DAG: directed acyclic graph (BN’s structure) • Nodes: random variables (typically binary or discrete, but methods also exist to handle continuous variables) • Arcs: indicate probabilistic dependencies between nodes (lack of link signifies conditional independence) • CPD: conditional probability distribution (BN’s parameters) • Conditional probabilities at each node, usually stored as a table (conditional probability table, or CPT) • Root nodes are a special case – no parents, so just use priors in CPD:
Example BN P(a) = 0.001 A B C D E P(c|a) = 0.2 P(c|a) = 0.005 P(b|a) = 0.3 P(b|a) = 0.001 P(e|c) = 0.4 P(e|c) = 0.002 P(d|b,c) = 0.1 P(d|b,c) = 0.01 P(d|b,c) = 0.01 P(d|b,c) = 0.00001 Uppercase: variables (A, B, …) Lowercase: values/states of variables (A has two states a and a) Note that we only specify P(a) etc., not P(¬a), since they have to add to one
Conditional independence and chaining • Conditional independence assumption where q is any set of variables (nodes) other than and its successors • blocks influence of other nodes on and its successors (q influences only through variables in ) • With this assumption, the complete joint probability distribution of all variables in the network can be represented by (recovered from) local CPDs by chaining these CPDs: q
A B C D E Chaining: Example Computing the joint probability for all variables is easy: The joint distribution of all variables P(A, B, C, D, E) = P(E | A, B, C, D) P(A, B, C, D) by Bayes’ theorem = P(E | C) P(A, B, C, D) by cond. indep. assumption = P(E | C) P(D | A, B, C) P(A, B, C) = P(E | C) P(D | B, C) P(C | A, B) P(A, B) = P(E | C) P(D | B, C) P(C | A) P(B | A) P(A)
A A B C B B A C C Topological semantics • A node is conditionally independent of its non-descendants given its parents • A node is conditionally independent of all other nodes in the network given its parents, children, and children’s parents (also known as its Markov blanket) • The method called d-separation can be applied to decide whether a set of nodes X is independent of another set Y, given a third set Z Chain: A and C are independent, given B Converging: B and C are independent, NOT given A Diverging: B and C are independent, given A
Inference tasks • Simple queries: Computer posterior marginal P(Xi | E=e) • E.g., P(NoGas | Gauge=empty, Lights=on, Starts=false) • Posteriors for ALL nonevidence nodes • Priors for and/all nodes (E = ) • Conjunctive queries: • P(Xi, Xj | E=e) = P(Xi | E=e) P(Xj | Xi, E=e) • Optimal decisions:Decision networks or influence diagrams include utility information and actions; probabilistic inference is required to find P(outcome | action, evidence) • Value of information: Which evidence should we seek next? • Sensitivity analysis:Which probability values are most critical? • Explanation: Why do I need a new starter motor?
MAP problems (explanation) • The solution provides a good explanation for your action • This is an optimization problem
Approaches to inference • Exact inference • Enumeration • Variable elimination • Belief propagation in polytrees (singly connected BNs) • Clustering / join tree algorithms • Approximate inference • Stochastic simulation / sampling methods • Markov chain Monte Carlo methods • Loopy propagation • Mean field theory • Simulated annealing • Genetic algorithms • Neural networks
Direct inference with BNs • Instead of computing the joint, suppose we just want the probability for one variable • Exact methods of computation: • Enumeration • Variable elimination • Belief propagation (for polytree only) • Join/junction trees: clustering closely associated nodes into a big node in JT
Inference by enumeration • Add all of the terms (atomic event probabilities) from the full joint distribution • If E are the evidence (observed) variables and Y are the other (unobserved) variables, excluding X, then the posterior distribution P(X|E=e) = α P(X, e) = α ∑yP(X, e, Y) • Sum is over all possible instantiations of variables in Y • Each P(X, e, Y) term can be computed using the chain rule • Computationally expensive!
A BC DE Example: Enumeration • P(xi) = Σπi P(xi | πi) P(πi) • Suppose we want P(D), and only the value of E is given as true • P (d|e) = ΣABCP(a, b, c, d, e) = ΣABCP(a) P(b|a) P(c|a) P(d|b,c) P(e|c) • With simple iteration to compute this expression, there’s going to be a lot of repetition (e.g., P(e|c) has to be recomputed every time we iterate over C for all possible assignments of A and B))
Exercise: Enumeration p(smart)=.8 p(study)=.6 smart study p(fair)=.9 prepared fair pass Query: What is the probability that a student studied, given that they pass the exam?
Variable elimination • Basically just enumeration, but with caching of local calculations • Linear for polytrees • Potentially exponential for multiply connected BNs • Exact inference in Bayesian networks is NP-hard!
Variable elimination General idea: • Write query in the form • Iteratively • Move all irrelevant terms outside of innermost sum • Perform innermost sum, getting a new term • Insert the new term into the product
Variable elimination 8 x 4 multiplications 8 x 2 + 4 x 2 + 2 = 26 multiplications Example: ΣAΣBΣCP(a) P(b|a) P(c|a) P(d|b,c) P(e|c) = ΣAΣBP(a)P(b|a)ΣCP(c|a) P(d|b,c) P(e|c) = ΣAP(a)ΣBP(b|a)ΣCP(c|a) P(d|b,c) P(e|c) for each state of A = a for each state of B = b compute fC(a, b) = ΣCP(c|a) P(d|b,c) P(e|c) compute fB(a) = ΣBP(b)fC(a, b) Compute result = ΣAP(a)fB(a) Here fC(a, b), fB(a) are called factors, which are vectors or matrices Variable C is summed out variable B is summed out
Cloudy Rain Sprinkler WetGrass Variable elimination: Example
Variable elimination algorithm • Let X1,…, Xm be an ordering on the non-query variables • For i = m, …, 1 • Leave in the summation for Xi only factors mentioning Xi • Multiply the factors, getting a factor that contains a number for each value of the variables mentioned, including Xi • Sum out Xi, getting a factor f that contains a number for each value of the variables mentioned, not including Xi • Replace the multiplied factor in the summation
Complexity of variable elimination Suppose in one elimination step we compute This requires multiplications (for each value for x, y1, …, yk, we do m multiplications) and additions (for each value of y1, …, yk , we do |Val(X)| additions) ►Complexity is exponential in the number of variables in the intermediate factors ►Finding an optimal ordering is NP-hard
Exercise: Variable elimination p(smart)=.8 p(study)=.6 smart study p(fair)=.9 prepared fair pass Query: What is the probability that a student is smart, given that they pass the exam?
A BC D E = e F Belief Propagation • Singly connected network, SCN (also known as polytree) • there is at most one undirected path between any two nodes (i.e., the network is a tree if the direction of arcs are ignored) • The influence of the instantiated variable (evidence) spreads to the rest of the network along the arcs • The instantiated variable influences its predecessors and successors differently (using CPT along opposite directions) • Computation is linear to the diameter of the network (the longest undirected path) • Update belief (posterior) of every non-evidence node in one pass • For multi-connected net: conditioning
A BC DE Conditioning • Conditioning: Find the network’s smallest cutset S (a set of nodes whose removal renders the network singly connected) • In this network, S = {A} or {B} or {C} or {D} • For each instantiation of S, compute the belief update with the belief propagation algorithm • Combine the results from all instantiations of S (each is weighted by P(S = s)) • Computationally expensive (finding the smallest cutset is in general NP-hard, and the total number of possible instantiations of S is O(2|S|))
Junction Tree • Convert a BN to a junction tree • Moralization: add undirected edge between every pair of parents, then drop directions of all arc: Moralized Graph • Triangulation: add an edge to any cycle of length > 3: Triangulated Graph • A junction tree is a tree of cliques of the triangulated graph • Cliques are connected by links • A link stands for the set of all variables S shared by these two cliques • Each clique has a CPT, constructed from CPT of variables in the original BN
Junction Tree • Reasoning • Since it is now a tree, polytree algorithm can be applied, but now two cliques exchange P(S), the distribution of S • Complexity: • O(n) steps, where n is the number of cliques • Each step is expensive if cliques are large (CPT exponential to clique size) • Construction of CPT of JT is expensive as well, but it needs to compute only once.
Approximate inference: Direct sampling • Suppose you are given values for some subset of the variables, E, and want to infer values for unknown variables, Z • Randomly generate a very large number of instantiations from the BN • Generate instantiations for all variables – start at root variables and work your way “forward” in topological order • Rejection sampling: Only keep those instantiations that are consistent with the values for E • Use the frequency of values for Z to get estimated probabilities • Accuracy of the results depends on the size of the sample (asymptotically approaches exact results) • Very expensive
Exercise: Direct sampling p(smart)=.8 p(study)=.6 smart study p(fair)=.9 prepared fair pass Topological order = …? Random number generator: .35, .76, .51, .44, .08, .28, .03, .92, .02, .42
Likelihood weighting • Idea: Don’t generate samples that need to be rejected in the first place! • Sample only from the unknown variables Z • Weight each sample according to the likelihood that it would occur, given the evidence E • A weight w is associated with each sample (w initialized to 1) • When a evidence node (say E = e) is selected for sampling, its parents are already sampled (say parents A and B are assigned state a and b) • Modify w = w * P(e | a, b) based on E’s CPT
Markov chain Monte Carlo algorithm • So called because • Markov chain – each instance generated in the sample is dependent on the previous instance • Monte Carlo – statistical sampling method • Perform a random walk through variable assignment space, collecting statistics as you go • Start with a random instantiation, consistent with evidence variables • At each step, for some nonevidence variable x, randomly sample its value by • Given enough samples, MCMC gives an accurate estimate of the true distribution of values (no need for importance sampling because of Markov blanket)
Exercise: MCMC sampling p(smart)=.8 p(study)=.6 smart study p(fair)=.9 prepared fair pass Topological order = …? Random number generator: .35, .76, .51, .44, .08, .28, .03, .92, .02, .42
Loopy Propagation • Belief propagation • Works only for polytrees (exact solution) • Each evidence propagates once throughout the network • Loopy propagation • Let propagate continue until the network stabilize (hope) • Experiments show • Many BN stabilize with loopy propagation • If it stabilizes, often yielding exact or very good approximate solutions • Analysis • Conditions for convergence and quality approximation are under intense investigation
Noisy-Or BN • A special BN of binary variables (Peng & Reggia, Cooper) • Causation independence: parent nodes influence a child independently • Advantages: • One-to-one correspondence between causal links and causal strengths • Easy for humans to understand (acquire and evaluate KB) • Fewer # of probabilities needed in KB • Computation is less expensive • Disadvantage: less expressive (less general)