Data Structures and Algorithms for Efficient Shape Analysis
Data Structures and Algorithms for Efficient Shape Analysis. by Roman Manevich Prepared under the supervision of Dr. Shmuel (Mooly) Sagiv. Motivation. TVLA is a powerful and general abstract interpretation system Abstract interpretation in TVLA

Data Structures and Algorithms for Efficient Shape Analysis
E N D
Presentation Transcript
Data Structures and Algorithms for Efficient Shape Analysis byRoman Manevich Prepared under the supervision of Dr. Shmuel (Mooly) Sagiv
Motivation • TVLA is a powerful and general abstract interpretation system • Abstract interpretation in TVLA • Operational semantics is expressed with first-order logic + TC formulae • Program states are represented assets of Evolving First-Order Structures • Efficiency is an issue
Outline • Shape Analysis quick intro • Compactly representing structures • Tuning abstraction to improve performance
What is Shape Analysis • Determines Shape Invariants for imperative programs • Can be used to verify a wide range of properties over different programming languages
reverse Example /* list.h */typedef struct node { struct node * n; int data;} * List; /* print.c */#include “list.h”List reverse (List x) { List y, t; y = NULL; while (x != NULL) { t = y; y = x; x = xn; yn = t; } return y; }
reverse Example Shape before x n . . . n Shape after y n . . . n
Definition of a First-Order Logical Structure S = <U, > U – a set of individuals (“node set”) – a mapping p(r) (Ur {0,1}) the “interpretation” of p
Information order Three-Valued Logic • 1: True • 0: False • 1/2: Unknown • A join semi-lattice: 0 1 = 1/2 1/2
Canonical Abstraction • Partition the individuals into equivalence classes based on the values of their unary predicates • Collapse other predicates via • pS(u’1, ..., u’k) = {pB(u1, ..., uk) | f(u1)=u’1, ..., f(u’k)=u’k) } • At most 3n abstract individuals
u0 r[n,x] u0 r[n,x] u r[n,x] Canonical Abstraction Example u1 r[n,x] u2 r[n,x] u3 r[n,x] n n n x n x n
Compactly Representing First-Order Logical Structures • Space is a major bottleneck • Analysis explores many logical structures • Reduce space by sharing information across structures
Desired Properties • Sparse data structures • Share common sub-structures • Inherited sharing • Incidental sharing due to program invariants • But feasible time performance • Phase sensitive data structures
Chapter Outline • Background • First-order structure representations • Base representation (TVLA 0.91) • BDD representation • Empirical evaluation • Conclusion
First-Order Logical Structures • Generalize shape graphs • Arbitrary set of individuals • Arbitrary set of predicates on individuals • Dynamically evolving • Usually small changes • Properties are extracted by evaluating first order formula: ∃v1 , v: x(v1) ∧ n(v1, v) • Join operator requires isomorphism testing
First-Order Structure ADT • Structure : new() /* empty structure */ • SetOfNodes : nodeSet(Structure) • Node : newNode(Structure) • removeNode(Structure, node) • Kleeneeval(Structure, p(r), <u1, . . . ,ur>) • update(Structure, p(r), <u1, . . . ,ur>, Kleene) • Structurecopy(Structure)
print_all Example /* list.h */typedef struct node { struct node * n; int data;} * L; /* print.c */#include “list.h”void print_all(L y) { L x;x = y; while (x != NULL) { /* assert(x != NULL) */ printf(“elem=%d”, xdata);x = xn; }}
print_all Example n=½ usm=½ u1y=1 n=½ S1 n=½ usm=½ u1y=1 n=½ S0 x = y x’(v) := y(v) copy(S0) : S1 nodeset(S0) : {u1, u} eval(S0, y, u1) : 1 update(S1, x, u1, 1) x=1 eval(S0, y, u) : 0 update(S1, x, u, 0)
print_all Example n=½ while (x != NULL)precondition : ∃v x(v) u1x=1y=1 usm=½ n=½ S1 n=½ x = x nfocus : ∃v1 x(v1) ∧ n(v1, v)x’(v) := ∃v1 x(v1) ∧ n(v1, v) usm=½ u1y=1 S2.0 n=½ u1y=1 ux=1 S2.1 n=1 n=½ n=½ n=½ u.0sm=½ u1y=1 n=1 S2.2 u.1x=1
Overview and Main Results • Two novel representations of first-order structures • New BDD representation • New representation using functional maps • Implementation techniques • Empirical evaluation • Comparison of different representations • Space is reduced by a factor of 4–10 • New representations scale better
Base Representation (Tal Lev-Ami SAS 2000) • Two-Level Map : Predicate (Node Tuple Kleene) • Sparse Representation • Limited inherited sharing by “Copy-On-Write”
BDDs in a Nutshell (Bryant 86) • Ordered Binary Decision Diagrams • Data structure for Boolean functions • Functions are represented as (unique) DAGs x1 x2 x2 x3 x3 x3 x3 0 0 0 1 0 1 0 1
BDDs in a Nutshell (Bryant 86) • Ordered Binary Decision Diagrams • Data structure for Boolean functions • Functions are represented as (unique) DAGs • Also achieve sharing across functions x1 x1 x1 x2 x2 x2 x2 x2 x3 x3 x3 x3 x3 x3 x3 0 1 0 1 0 1 Duplicate Terminals Duplicate Nonterminals Redundant Tests
Encoding Structures Using Integers • Static encoding of • Predicates • Kleene values • Dynamic encoding of nodes • 0, 1, …, n-1 • Encode predicate p’s values as • ep(p).en(u1). en(u2) . … . en(un) . ek(Kleene)
x1 x2 x2 x3 0 1 BDD Representation of Integer Sets • Characteristic function • S={1,5} 1=<001>5=<101> S = (¬x1¬x2x3) (x1¬x2x3)
x1 x2 x2 x3 1 BDD Representation of Integer Sets • Characteristic function • S={1,5} 1=<001>5=<101> S = (¬x1¬x2x3) (x1¬x2x3)
BDD Representation Example n=½ usm=½ S0 n=½ S0 u1y=1 1
BDD Representation Example n=½ usm=½ S0 S1 n=½ S0 u1y=1 x=y n=½ u1x=1y=1 usm=½ n=½ S1 1
BDD Representation Example S2.2 n=½ usm=½ S0 S1 n=½ S0 u1y=1 x=y n=½ u1x=1y=1 usm=½ n=½ S1 x=xn n=½ n=½ n=½ u.0sm=½ u1y=1 n=1 S2.2 u.1x=1 1
BDD Representation Example S2.2 n=½ usm=½ S0 S1 n=½ S0 u1y=1 x=y n=½ u1x=1y=1 usm=½ n=½ S1 x=xn n=½ n=½ n=½ u.0sm=½ u1y=1 n=1 S2.2 u.1x=1 1
Improved BDD Representation • Using this representation directlydoesn’t save space – canonicity doesn’t carry over from propositional to first-order logic • Observation • Node names can be arbitrarily remapped without affecting the ADT semantics • Our heuristics • Use canonic node names to encode nodes and obtain a canonic representation • Increases incidental sharing • Reduces isomorphism test to pointer comparison • 4-10 space reduction
Reducing Time Overhead • Current implementation not optimized • Expensive formula evaluation • Hybrid representation • Distinguish between phases:mutable phase Join immutable phase • Dynamically switch representations
Functional Representation • Alternative representation for first-order structures • Structures represented by maps from integers to Kleene values • Tailored for representing first-order structures • Achieves better results than BDDs • Techniques similar to the BDD representation • More details in the thesis
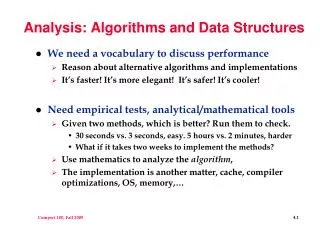
Empirical Evaluation • Benchmarks: • Cleanness Analysis (SAS 2000) • Garbage Collector • CMP (PLDI 2002) of Java Front-End and Kernel Benchmarks • Mobile Ambients (ESOP 2000) • Stress testing the representations • We use “relational analysis” • Save structures in every CFG location
Abstract Counters • Ignore language/implementation details • A more reliable measurement technique • Count only crucial space information • Independent of C/Java
Conclusions • Two novel representations of first-order structures • New BDD representation • New representation using functional maps • Implementation techniques • Substantially better than inherited sharing • Structure canonization is crucial • Normalization via hash-consing is the key technique
Conclusions • The use of BDDs for static analysis is not a panacea for space saving • Domain-specific encoding crucial for saving space • Failed attempts • Original implementation of Veith’s encoding • PAG
Tuning Abstraction for Improved Performance • Analysis can be very costly • Explores many structuresGC example explores >180,000 structures
Existing Analysis Modes • Relational analysis • Doubly-exponential in worst case • Our most precise method • Single-structure analysis (Tal Lev-Ami SAS 2000) • Singly-exponential in worst case • Can be very efficient • Can be very imprecise • Sometimes very inefficient
Single-Structure Analysis May exist n u1 u x S0 n u1 u x S0 S1 u1 x S1
Single-Structure Analysis • Active property • ac=0 doesn’t exist in every concrete structure • ac=1 exists in every concrete structure • ac=1/2 may exist in some concrete structure u1ac=1 n uac=1 x S0 u1ac=1 n uac=1/2 x S0 S1 u1 ac=1 x S1
Single-Structure Analysis • Sometimes overly imprecise • Refine analysis by using nullary predicates to distinguish between different structures
Is there a “sweet spot”? Efficiency Relational Analysis Precision
Chapter Outline • Removing embedded structures • Merging structures with same set of canonical names • Staged analysis to localize abstraction • Merging pseudo-embedded structures
Order Relations on Structures and Sets of Structures • S, S’ 3-STRUCTSƒS’ if for every predicate p • ps(u1,…,uk) ps’(ƒ(u1),…, ƒ(uk)) • ({u | ƒ(u)=u’} > 1) sms’(u’) • X, X’ 23-STRUCTX X’ Every SX has S’X’ and SS’
Compacting Transformations We look for transformation T: 23-STRUCT 23-STRUCT with the following properties: • Compacting – |T(x)| |x| • Conservative –T(x) x Without sacrificing precision
u2 r[n,t]r[n,y] u0 r[n,x] u0 r[n,x] u2 r[n,t]r[n,y] ƒ u1 r[n,t]r[n,y] ƒ ƒ Removing Embedded Structures S1 S0 x x n y y u1 r[n,t]r[n,y] n n t t
u2 r[n,t]r[n,y] u2 r[n,t]r[n,y] u0 r[n,x] u0 r[n,x] u1 r[n,t]r[n,y] Removing Embedded Structures Reversing a listwith exactly 3 cells Reversing a listwith at least 3 cells S1 S0 x x n y y u1 r[n,t]r[n,y] n n t t