SAW TOOTH
SAW TOOTH. The saw tooth effect in the geometry measurements, possible remedies by data treatment. ElenaWildner and Natalia Emelianenko AT/MAS. Outline. I. Description of problem. II. Reasons for the effect. III. Evaluation criteria. IV. Results of the evaluation. V. Conclusion.

SAW TOOTH
E N D
Presentation Transcript
SAW TOOTH The saw tooth effect in the geometry measurements,possible remedies by data treatment ElenaWildner and Natalia Emelianenko AT/MAS
Outline I. Description of problem II. Reasons for the effect III. Evaluation criteria IV. Results of the evaluation V. Conclusion
I. Description of the problem 1 The analysis is made for the Dipole where the effect is significant Magnet 2248 Result from measurement after cold test. Questions: Why do the spools “move” by up to 0.5 mm from industry measurement to CERN measurement? Why are measurements varying up to 1 mm along the axis? The two measurements from both sides of the magnet separated: Red: connection side Blue: lyra side
I. Description of the problem 2 The idea: Consider the point close to the Tracker more correct than points far from the Tracker. By superposing the curves while keeping fix the points close to the tracker, we can reduce the saw tooth considerably and retrieve the shape The questions: What do the effect(s) come from ? Where is the new GA ? Is the deviation linear ? Is the procedure applicable to different kinds of errors? Where exactly are the “fix points” ? What are the criteria for a good data treatment? What best fits to apply for the measurement curves to be rotated? Etc……
I. Description of the problem 2 D.Missiaen, M, Dupont, P. Winkes: The Laser Tracker: a major tool for the metrology of the LHC, IWAA2004, CERN, Geneva, 4-7 October 2004
I. Description of the problem 2 E. Ainardi, L.Bottura, and N.Smirnov, “Light beam deflection through a 10m long dipole model”, CERN LHC-MTA, Tech. Rep. May 1999. N. Smirnov et al. “The methods of the LHC Magnets’ Magnetic Axis Location Measurement”. IWAA 1999. P.Schnizer et al. “Experience from measuring the LHC Quadrupole axes”. IWAA 2004. • Interesting reading! What we use for our presentation are the following facts from these articles: • We may have a longitudinal temperature difference along the magnet • This may cause a convection cell at the ends of the magnet at ~ 0.2 m from the cold bore ends • The convection cells deflect the light beam • Act only in the vertical plane lens error tracker 0.2
I. Description of the problem 2 To sum up: Bundle (best fit on network points of several measurements to have the measurements in the same reference system): 0.08 mm rms at any position (3s ~ 0.2 mm). Calibration centring error: 0.07 mm. This is not visible in the vertical plane and considered = 0 for the treatment. Leica errors with distance: 5 ppm (rms) which translates to 0.005*3 mm for close points and 0.075*3 mm for far points. This we take into account. The temperature effect may contribute to more than 0.5 mm for quadrupole (shorter than dipole). For the present production conditions this seems to give a considerable contribution, that could be corrected. For this effect we have a bias of the magnet positioning (magnets too low). To have an idea of the errors for one measurement from one side we have taken the xxx??? (in this way we try to make sure that shape changes do not contribute)
I. Description of the problem 2 • Spool piece position calculation (industry data), evaluation of effect of saw tooth on positioning (CERN data) • 2. Aperture: • The degradation in the vertical plane of the so called geometry classes is very sensitive. If the tolerances are tightened by only 0.15 mm all golden magnets degrade to silver!!! Where is really the magnet? Are the shifts in the correct direction? All degraded if 0.1 mm shift in GA in firm 2!!! fraction fraction v h h [0.01mm] v [0.01 mm] 0.01 mm
I. Description of the problem 2 Dipoles of firm 1 tested during last 5 months of 2005, aperture 1
Saw Tooth Height I. Description of the problem 2 The “Y-mate” point should be calculated for each point measured from another side by means of interpolation difference
Saw Tooth Height – Average I. Description of the problem 2 To calculate the average saw tooth height the area between the curves should be divided by the length on which the both points are known at each yi — + If the connection curve lies below the lyre one, the area is negative. We can sum up signed or absolute values. Since the points are evenly spread this differs from simple average by max 0.02 mm
Average Tooth Height over Time I. Description of the problem 2 Absolute “With sign”
Average Absolute Height: Firms I. Description of the problem 2 Step ITP15
Average Absolute Height: Firms I. Description of the problem 2 Step ITP20-GEO
Difference is not always Linear: Example 1 I. Description of the problem 2 For many magnets the difference in the middle is constant or decreasing when the global slope is positive. Example: 3428 A1 WP08-FID Diff > 0
Difference is not Linear: Example 3 I. Description of the problem 2 Example: 1045 A2 Step WP08-FID Unusual pattern
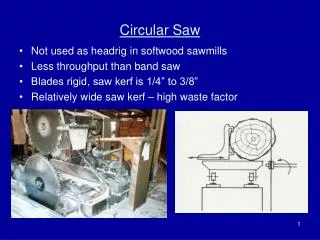
I. Description of the problem 2 Horizontal Plane Saw tooth criterion: Whole production statistics is very close to the simulation results* (G.Gubello et al. 2004) Here p - slope, q – shift, h – tooth * Vertical plane similar from recent modeling by Marco
The Bundle I. Description of the problem 2 Arbitrary reference systems, chosen here to be the GA of one side measurement
The Bundle I. Description of the problem 2 Saw tooth criterion:
The Bundle I. Description of the problem 2 Saw tooth criterion:
The Bundle I. Description of the problem 2 In industry: Where is mounted the spool piece? The best possible guess of the tube position is the “mean” of the point. GA is the best possible choice. We have to estimate the error on the spool piece position by the difference in the GA of the two measurements from the two sides. GA on which the spool is mounted and measured, itp15bis. Itp20 just intermediate (for corrector) “Best fit” At CERN: the spool piece is measured via an external point (end cover) so no problem with saw tooth. The effect is small for the aperture, impact has been evaluated by simulations by Marco la China.
I. Description of the problem 2 z 2D !!! Linear interpolation from “knee” at 0.2 cm, from ends y Reference line for the correction 0.2 m 0.2 m Crossover straight line from best fit and the 0.2 m boundary (rotation point) Convection cell position Measurement from Connection Side Measurement from Non Connection Side
I. Description of the problem 2 Procedure proposed for the correction: Connection side Non Connection side z y
I. Description of the problem 2 1. Why do we choose 0.2 m from the ends? The position of the convection cell is difficult to estimate by analysis (very few measurement points). The value is chosen from MTM reports. We have made and extensive analysis of the impact of moving the position of the convection cell and the change in saw tooth between 0.1 and is less than for the largest saw tooth
I. Description of the problem 2 2. Why do we make a linear interpolation of the measurement? The measurement is not linear and often different from the nominal vertical shape due to gravity. The linear interpolation is chosen due to the similarity with the GA construction which is a best fit of a plane (however 3D). 3. Why is the reference line taken between the two knee points? We estimate that the two knee-points are the two last points where the data is not affected by the light deflection. So from these points onward we should superpose the two curves best fitted with straight lines.
I. Description of the problem 2 • We believe that we can treat the data so as to get a better idea of the magnet shape by compensating for the temperature effects • How to proceed to check this assumption? • Check the corrected value of the saw tooth (using the criteria described above). It should be small (comparable to the measurement errors for one measurement, from one side). • Compare shape at WP08 with shape at itp20, including position of end cover. If we can recover the shape at ITP20 by this method we believe the idea makes sense. Checks are made also for one case in industry where two measurements were made for magnet 2279. • A set of magnets have been chosen where the saw tooth is significant and where outliers (peaks in the measurements) have been excluded.
I. Description of the problem 2 Outlier if > 6 sigma MAGNET_NU,STEP 1105,WP08B-FID 1123,WP08C-FID 1135,WP08B-FID 1153,WP08B-FID 1154,WP08B-FID 1178,WP08B-FID 1211,WP08B-FID 1213,WP08B-FID 1221,WP08B-FID 1246,WP08C-FID 2056,WP08B-FID 2086,WP08B-FID 2096,WP08B-FID 2118,WP08B-FID 2133,WP08B-FID 2152,WP08B-FID 2195,WP08B-FID 2216,WP08B-FID 3035,WP08B-FID 3102,WP08B-FID 3152,WP08B-FID 3158,WP08B-FID 3203,WP08B-FID 3209,WP08B-FID 3238,WP08B-FID 3348,WP08B-FID 3392,WP08B-FID 3395,WP08B-FID Stdev = 0.07 mm Stable distance is chosen between Y = 1.4 m and Y = 13.8 m.
I. Description of the problem 2 Check the value of the saw tooth
I. Description of the problem 2 Magnet shift 1153 0 1154 0 2096 0 2152 0 3152 .1 3203 0 3209 0 3395 0 1178 .2 1221 0 1246 0 2133 -.25 3158 0 3392 0 2056 0 3348 0 1123 0 1213 0 1211 0 2216 0 3238 .15 2086 -.15 2118 0 The magnet should be shifted by 0.2 positive!!! The magnet should be shifted by 0.3 positive!!!
I. Description of the problem 2 shifts z correction y
II. ANTIMATTER AND THE UNIVERSE 1933 Dirac’s Vision “If we accept the view of complete symmetry between positive and negative electric charge so far as concerns the fundamental laws of Nature, we must regard it rather as an accident that the Earth (and presumably the whole solar system), contains a preponderance of negative electrons and positive protons. It is quite possible that for some of the stars it is the other way about, these stars being built up mainly of positrons and negative protons. In fact, there may be half the stars of each kind. The two kind of stars would both show exactly the same spectra, and there would be no way of distinguishing them by present astronomical methods.” From his Nobel lecture (12 December 1933) 1) Symmetric Universe? 2) Where is the antimatter? 3) Antihydrogen spectrum?
I. History - Overview 1932 Positron 1948 Positronium Technical developments 1980s-now Colliders (SppS, Tevatron) Trapping 1996: Hot (v~c) Antihydrogen Cold Antihydrogen 1905 Special relativity 1925 Quantum Mechanics 1927 Dirac Equation 1955 Antiproton 1956 Antineutron 1965 Antideuteron 1956-1980s: Scattering, annihilation, Meson spectroscopy 1970s Accumulation + Cooling 1970 Anti-Helium-3 1980s-now: W,Z, b,t physics 1978 Anti-Tritium 1983-1996 LEAR Primordial Antimatter? Anti-Stars? 2000-now Antiproton Decelerator