Advanced Data Assimilation in NWP Models Using MLEF Approach
Explore the Maximum Likelihood Ensemble Filter (MLEF) approach for estimating state variables in non-linear dynamic models. Learn about analysis and forecast error covariance, assimilation algorithms, and optimization techniques. Discover various model options, observation types, and solution estimators.

Advanced Data Assimilation in NWP Models Using MLEF Approach
E N D
Presentation Transcript
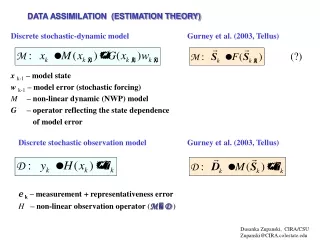
DATA ASSIMILATION (ESTIMATION THEORY) Discrete stochastic-dynamic model Gurney et al. (2003, Tellus) (?) xk-1 – model state wk-1 – model error (stochastic forcing) M – non-linear dynamic (NWP) model G – operator reflecting the state dependence of model error Discrete stochastic observation model Gurney et al. (2003, Tellus) ek – measurement + representativeness error H – non-linear observation operator (M D ) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH Minimize cost function J Change of variable - model state vector of dim Nstate >>Nens - control vector in ensemble space of dim Nens Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH (continued) Analysis error covariance In Gurney et al. (2003) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH (continued) Forecast error covariance In standard Kalman filter Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm prep_ensda.sh WARM start: Copy files from previously completed cycle COLD start: Run randomly-perturbed ensemble forecasts to initialize fcst err cov cycle_ensda.sh icycle < N_cycles_max fcsterr_cov.sh - Prepare first-guess (background) vector - Prepare forecast error covariance (from ensembles) prep_obs.sh Given ‘OBSTYPE’ and ‘delobs’, select and copy available obs files assimilation.sh Iterative minimization of cost function, save current cycle output Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm assimilation.sh script assimilation.sh iter < ioutmax forward.sh: Transformation from model space to observation space Hessian preconditioning (only for iter=1) Gradient calculation (ensembles) Cost function calculation (diagnostic) Minimization (ensemble subspace) Step-length (line-search) Control variable update (transformation from ensemble subspace to model (physical) space) - Analysis error covariance calculation - Save current cycle output files - Post-processing (chi-square, RMS, etc.) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm Options Models: KdVB, GEOS, SWM, RAMS, T3 … Observations: Synthetic or include various real observations Obs. operators: Include various forward operators Solution Type: Mode (max likelihood-MLEF) or Mean (ensemble mean ETKF) Estimator: Filter or Smoother Control variable: Initial conditions, Model bias, Model parameters Covariances: Localized, or Non-localized forecast error covariance Minimization: Minimization algorithm (C-G, L-BFGS) MPI: ParallelMPI run or a Single processor run Verifications: Innovation statistics (chi-square test, K-S test), RMS-errors Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu