Overview of Distributed Transactional Memory Research at INESC-ID
190 likes | 327 Vues
Join us for an insightful presentation by Prof. Luis Rodrigues on Distributed Transactional Memory (DTM), which merges the simplicity of Transactional Memory with the scalability and resilience offered by distributed platforms. This talk will provide an overview of research conducted by the Distributed Systems Group at INESC-ID since 2008, highlighting core findings and offering a roadmap for future work. Ideal for those interested in cloud computing, high-performance computing, and innovative programming paradigms.

Overview of Distributed Transactional Memory Research at INESC-ID
E N D
Presentation Transcript
Prof Philippas Tsigas Distributed Computing and Systems Research Group Distributedsystems IIAGREEMENT (2-3 phase CoM.)
DISTRIBUTED SOFTWARE TRANSACTIONAL MEMORIES: A SUMMARY OF RESEARCH @ IST/INESC-ID 2013-02-01 10:00-11:00 Room 8103 7th floor, EDIT-building prof Luis Rodrigues Abstract Distributed Transactional Memory (DTM) aims at introducing a novel programming paradigm combining the simplicity of Transactional Memory (TM) with the scalability and failure resiliency achievable by exploiting the resource redundancy of distributed platforms. These features make the DTM model particularly attractive for inherently distributed application domains such as Cloud computing or High Performance Computing (HPC). The Distributed Systems Group at INESC-ID has started to perform research on DTMs in 2008. The talk makes an overview of this research, highlighting the main findings and providing directions for future work. 2
”I can’t find a solution, I guess I’m just too dumb” • Picture from Computers and Intractability, by Garey and Johnson 3
”I can’t find an algorithm, because no such algorithm is possible” • Picture from Computers and Intractability, by Garey and Johnson 4
”I can’t find an algorithm, but neither can all these famous people.” • Picture from Computers and Intractability, by Garey and Johnson 5
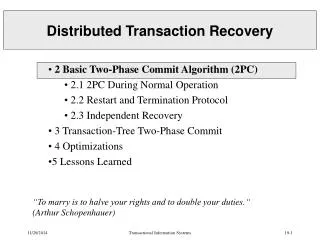
Atomic commit protocols • transaction atomicity requires that at the end, • either all of its operations are carried out or none of them. • in a distributed transaction, the client has requested the operations at more than one server • one-phase atomic commit protocol • the coordinator tells the participants whether to commit or abort • what is the problem with that? • this does not allow one of the servers to decide to abort – it may have discovered a deadlock or it may have crashed and been restarted • two-phase atomic commit protocol • is designed to allow any participant to choose to abort a transaction • phase 1 - each participant votes. If it votes to commit, it is prepared. It cannot change its mind. In case it crashes, it must save updates in permanent store • phase 2 - the participants carry out the joint decision The decision could be commit or abort - participants record it in permanent store • 6
Failure model for the commit protocols • Failure model for transactions • this applies to the two-phase commit protocol • Commit protocols are designed to work in • synchronous system, system failure when a msg does not arrive on time. • servers may crash but a new process whose state is set from information saved in permanent storage and information held by other processes. • messages may NOT be lost. • assume corrupt and duplicated messages are removed. • no byzantine faults – servers either crash or they obey their requests • 2PC is an example of a protocol for reaching a consensus. • Chapter 11 says consensus cannot be reached in an asynchronous system if processes sometimes fail. • however, 2PC does reach consensus under those conditions. • because crash failures of processes are masked by replacing a crashed process with a new process whose state is set from information saved in permanent storage and information held by other processes. • 7
canCommit?(trans)-> Yes / No • Call from coordinator to participant to ask whether it can commit a transaction. Participant replies with its vote. • doCommit(trans) • Call from coordinator to participant to tell participant to commit its part of a transaction. • doAbort(trans) • Call from coordinator to participant to tell participant to abort its part of a transaction. • haveCommitted(trans, participant) • Call from participant to coordinator to confirm that it has committed the transaction. • getDecision(trans) -> Yes / No • Call from participant to coordinator to ask for the decision on a transaction after it has voted Yes but has still had no reply after some delay. Used to recover from server crash or delayed messages. These are asynchronous requests to avoid delays Figure 13.4 Operations for two-phase commit protocol This is a request with a reply • participant interface- canCommit?, doCommit, doAbortcoordinator interface- haveCommitted, getDecision Asynchronous request • 8
Figure 13.5 The two-phase commit protocol • Phase 1 (voting phase): • 1. The coordinator sends a canCommit? request to each of the participants in the transaction. • 2. When a participant receives a canCommit? request it replies with its vote (Yes or No) to the coordinator. Before voting Yes, it prepares to commit by saving objects in permanent storage. If the vote is No the participant aborts immediately. • Phase 2 (completion according to outcome of vote): • 3. The coordinator collects the votes (including its own). • (a)If there are no failures and all the votes are Yes the coordinator decides to commit the transaction and sends a doCommit request to each of the participants. • (b)Otherwise the coordinator decides to abort the transaction and sends doAbort requests to all participants that voted Yes. • 4. Participants that voted Yes are waiting for a doCommit or doAbort request from the coordinator. When a participant receives one of these messages it acts accordingly and in the case of commit, makes a haveCommitted call as confirmation to the coordinator. 9 •
Two-Phase Commit Protocol • canCommit? canCommit? 1 2 yes no 3 doCommit doAbort 4 10
TimeOut Protocol 1 At step 2 and 3 no commit decision made OK to abort Coordinator will either not collect all commit votes or will vote for abort 2 3 4 11
TimeOut Protocol 1 • At step 4 • cohort cannot communicate with coordinator • Coordinator mayhave decided • Cohort must block until communication re-established • Might ask other cohorts 2 3 4 12
Restart Protocol • canCommit? canCommit? 1 • If the site • Has decided, it just picks up from where it left off • Is a cohort that had not voted, it decides abort • Is a cordinator that has not decided, it decides abort • A cohort that crashed after voting commit, it must block until it discovers 2 yes no 3 doCommit doAbort 4 13
Blocking • canCommit? canCommit? 1 • Blocking can occur if: • Coordinatoor crashes • Cohort cannot communicate with coordinator • Between 2 and 4 2 yes no 3 doCommit doAbort 4 14
Three-Phase Commit Protocol • canCommit? canCommit? 1 2 yes no 3 precommit doAbort 4 ack 5 commit 6 15
Performance of the two-phase commit protocol • if there are no failures, the 2PC involving N participants requires • NcanCommit? messages and replies, followed by NdoCommit messages. • the cost in messages is proportional to 3N, and the cost in time is three rounds of messages. • The haveCommitted messages are not counted • there may be arbitrarily many server and communication failures • 2PC is is guaranteed to complete eventually, but it is not possible to specify a time limit within which it will be completed • delays to participants in uncertain state • some 3PCs designed to alleviate such delays • they require more messages and more rounds for the normal case • 17
Distributed Systems CourseDistributed transactions 13.1 Introduction 13.2 Flat and nested distributed transactions 13.3 Atomic commit protocols 13.4 Concurrency control in distributed transactions 13.5 Distributed deadlocks 13.6 Transaction recovery
13.3.2 Two-phase commit protocol for nested transactions • Recall Fig 13.1b, top-level transaction T and subtransactions T1, T2, T11, T12, T21, T22 • A subtransaction starts after its parent and finishes before it • When a subtransaction completes, it makes an independent decision either to commit provisionally or to abort. • A provisional commit is not the same as being prepared: it is a local decision and is not backed up on permanent storage. • If the server crashes subsequently, its replacement will not be able to carry out a provisional commit. • A two-phase commit protocol is needed for nested transactions • it allows servers of provisionally committed transactions that have crashed to abort them when they recover. • 19