Download
1 / 21
210 likes | 359 Vues
U.C Berkeley Physics department Stamper-Kurn’s group. Imaging System of a Bose-Einstein Condensation Experiment, and its Automation. Fabien Lienhart. August, 29th 2003. Plan. Recent steps forward in the BEC experiment The Imaging System

E N D
U.C Berkeley Physics department Stamper-Kurn’s group Imaging System of a Bose-Einstein Condensation Experiment, and its Automation Fabien Lienhart August, 29th 2003
Plan • Recent steps forward in the BEC experiment • The Imaging System • Automation of the imaging system: Visual Basic in WinView
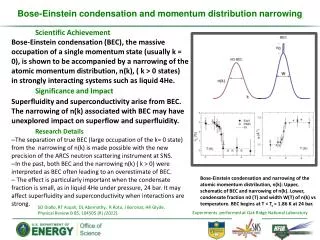
Improvements and breakthroughs on the BEC experiment • Ultrahigh Vacuum fixed • MOT laser brighter and monomode • Polarization Gradient cooling set • First efficient magnetic trappings • Next (last?) step…
Back to a Ultra-High Vacuum • Problem: water leaking from a coil in the vacuum chamber • Open the chamber, fix the leak, close the chamber and Back to the vacuum Torr • Rotary pump • Turbomolecular pump • 1 week baking-out, • monitored by a Rare Gas Analyser • Gauge limit 10-3 10-7 10-11
MOT Laser How things work… • Problem • Ugly beam which could be stronger • Solutions • Tapered amplifier: up to 300 mW • Polarization maintaining • optical fiber • Results • After the fiber: - 70 mW • - monomode • - good shape • Up to 3 billion atoms trapped
Optimizing pg-cooling How things work… • Improvements • Better beam shape • Transition between the two • pg-cooling steps found: • optimization of T and N • Results • 30 mK reached • (Time of flight measurement) Easy case of lin –lin light
First efficient magnetic trappings How Ioffe-Pritchard trap works… Results • More than 600 million atoms trapped • Lifetimes ranking from 15s (low Bias-Field) to 50s • Adiabatic compression achieved
The Imaging System • The constraints • The experimental device • Characterization of the system • Results and future work
The Constraints • Requirements of the system - Resonant light has to be used: 2-to-3 beam - Top-bottom axis - Keep the polarization of the light - Three very different magnifications: ~ ½, 5 and 16 • The difficulties • Top-bottom axis is already crowded! • Only a few gold mirrors can be used at 45o • Precise magnification needs to be known (quantitative imaging) and no way to place a fine object in the center of the trap!
Mag ½ Magnification: 0.510 0.015 Resolution: 80 mm (close to Camera limit) Not to sensitive to the position of the MOT But sensitive to the angle of the last lens (distortion) Mag 5 Magnification: 4.60 0.01 Resolution: 8.7 mm (close to diffraction limit) No distortion Resolution very sensitive to the position of the cloud Mag 16 Magnification: 12.0 0.6 Resolution: 14 mm Position of the camera affects the magnification (.35/cm) without really changing the resolution Very sensitive to the angle of the last lens (distortion) Results
Automation of the Imaging System • How WinView works • Adding buttons with WinView • Example of routine: rotating the images • Future work
How WinView works • WinView controls the camera • Automating WinView: • Using Macros • Easy, • but limited and buggy Or…
Adding buttons with Visual Basic • 1. Write your script in VB • Object Oriented Programming • Classes which implement WinView • 2. Transform it into a DLL • 3. Register the DLL • 4. A new icon should appear in • WinView’s taskbar
The implemented buttons • Close All - closes all the windows • AutoSave - saves all the windows with the date • QuickASCII - saves the image as a text • AbsorptionLoop - cycles absorption pictures • RotateFrame - rotates the pictures
Example: the rotation Problem Matrix index must be integer numbers Which is not the case after rotation Solutions Implementation of various algorithms 1. Closest neighbor 2. Gaussian interpolation 3. Bicubic interpolation 4. b-Spline method: 2 ideas leading to the best results
Idea 2 – Efficient 1D interpolation Cubic b-Spline Third order Basis Piecewise polynomials Advantages - Normalized contributions - Compact support -> local control - Interpolated function is C2 - Fast implementation: z-transform of the convolution gives an efficient recursive algorithm
Performances of the different methods • Original • Clothest neighbor • Gaussian interpolation • Bicubic interpolation • b-Spline method
Conclusion • Work achieved • - Imaging system: characterization and limits of the system • - WinView: add-ins • In the next month • Imaging system: • - way to easily calibrate the system • - try different lens for mag ½ and 16 • - WinView: gaussian fit of the profile of the cloud