LEGO Mindstorms NXT
LEGO Mindstorms NXT. SOURCES:. Carnegie Mellon Dacta Lego Timothy Friez Miha Štajdohar miha.stajdohar@fri.uni-lj.si. Sen sors. Sensors and Motors. Four sensor ports Sonar Sound Light Touch Three motor ports Each motor includes rotation counter. Touch Sensors.


LEGO Mindstorms NXT
E N D
Presentation Transcript
LEGO Mindstorms NXT SOURCES: Carnegie Mellon Dacta Lego Timothy Friez Miha Štajdoharmiha.stajdohar@fri.uni-lj.si
Sensors and Motors • Four sensor ports • Sonar • Sound • Light • Touch • Three motor ports • Each motor includes rotation counter
Touch Sensors • Education kit includes two sensors • Much more robust than old RCX touch sensors
Light Sensor • Reports light intensity as percentage • Two modes • Active • Passive • Practical uses • Identify intensity on paper • Identify lit objects in dark room • Detect shadows
Sound Sensor • Analogous to light sensor • Reports intensity • Reputed to identify tones • We have little experimented with this • Practical uses • “Clap” to signal robot
Ultrasonic (Sonar) Sensor • Reports distances • Range: about 5 cm to 250 cm • In practice: • Longer distances result in more missed “pings” • Mostly reliable • Occasionally gets “stuck” • Moving to a new location helps in receiving a sonar “ping”
Using Joysticks • To control your robot using a joystick axis or a button, use these functions • frcRF[port] – gets the value from a joystick axis • [port] – p1_y, p1_x, p1_wheel, … p2_x,…p3_x, etc. • frcOIJoystickButtons[port] • [port] – oiButtonPort1Button1 through oiButtonPort4Button4
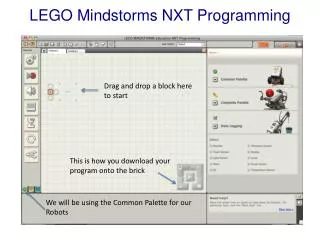
Using Loops • A Loop will help a portion of your code execute repeatedly, until told to stop. while(true == true) { motor[port1] = frcRF[p1_y]; motor[port2] = frcRF[p2_y]; } • This code will cause the motors to respond to the joystick values forever. • The loop reads (while true is equal to true)
Analog Sensors • Very easy to read analog sensor values • SensorValue[port] • [port] = in1,in2,in3 … in16 while(SensorValue[in1] < 10) { motor[port1] = frcRF[p1_y]; motor[port2] = frcRF[p2_y]; } • This program will run until an analog sensor on port 1 sees a value of less than 10. • Analog sensor values can range from 0 to 1023
Digital Sensors • Digital sensors are a little more complex • First you have to decide if you want the sensor port to be an input or output • frcDigitalIODirection[port] = condition; • port – pio1, pio2, pio3, … pio18 • condition – dirInput or dirOutput • Second you have read or assign the value • frcDigitalIOValue[port] • If an input, this will read the value (either a 1 or 0) • If an output, you can assign the value using a 1 or 0. • frcDigitalIOValue[port] = 1; // turns on the digital output port
ROBOTC for IFI – Version 1.14 • New ROBOTC version • Has built in support for: • encoders, • accelerometer, • gyro sensor, • OI LEDs • and more! • Make sure to upgrade!
IR Board Review • Rule Clarification from Team Update #3 • 4 Signals Allows • 4 Signals = 4 actions • Signals must repeat when the same button is pressed.
Operator Interface LEDs • 11 LEDs installed on Operator Interface • 7 Green • 4 Red • User Controllable with ROBOTC
Controlling the LEDs • New ROBOTC function • frcOILEDs[LED] = true or false • Examples • frcOILEDs[oiLEDPWM1_Green] = true; • Turns on PWM1 Green LED • frcOILEDs[oiLEDPWM1_Green] = false; • Turns off PWM1 Green LED