
Investigating Hip Joint Stiffness in Lower-Limb Paralysis Simulators for Gait Dynamics
This study explores the effects of hip joint stiffness in a lower-limb paralysis simulator (LLPS). By adjusting the spring attachment points on the LLPS's hip joint, researchers were able to modify stiffness, which has implications for gait rehabilitation. Reflective markers were placed on a subject using the LLPS for motion capture, although these markers were not part of the analyzed measurements. The findings aim to enhance the understanding of sagittal-plane hip joint stiffness and its impact on gait dynamics in orthosis-assisted walking.

Investigating Hip Joint Stiffness in Lower-Limb Paralysis Simulators for Gait Dynamics
E N D
Presentation Transcript
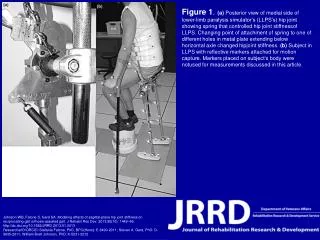
Figure 1. (a) Posterior view of medial side of lower-limb paralysis simulator’s (LLPS’s) hip joint showing spring that controlled hip joint stiffnessof LLPS. Changing point of attachment of spring to one of different holes in metal plate extending below horizontal axle changed hipjoint stiffness. (b) Subject in LLPS with reflective markers attached for motion capture. Markers placed on subject’s body were notused for measurements discussed in this article. Johnson WB, Fatone S, Gard SA. Modeling effects of sagittal-plane hip joint stiffness on reciprocating gait orthosis-assisted gait. J Rehabil Res Dev. 2013;50(10): 1449–56. http://dx.doi.org/10.1682/JRRD.2013.01.0013 ResearcherID/ORCID: Stefania Fatone, PhD, BPO(Hons): E-8490-2011; Steven A. Gard, PhD: D-9935-2011; William Brett Johnson, PhD: K-5231-2012