Understanding Ultrasonic Motors: Principles, Types, and Applications
This document presents a comprehensive overview of ultrasonic motors (USMs), their working mechanisms, and the piezoelectric effect that underpins their operation. It explores the advantages of USMs over traditional electromagnetic motors, highlighting their high torque at low density, making them ideal for applications in robotics, camera autofocus, and micro-surgery. The report discusses the fundamental construction of USMs, the various types including standing wave and traveling wave motors, and the implications of their unique characteristics in modern technology.

Understanding Ultrasonic Motors: Principles, Types, and Applications
E N D
Presentation Transcript
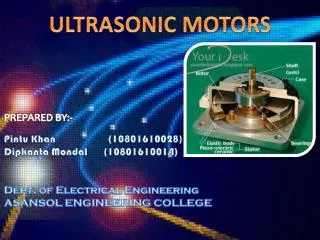
ULTRASONIC MOTORS PREPARED BY:- Pintu Khan (10801610028) DipkantaMondal (10801610014) Dept. of Electrical Engineering ASANSOL ENGINEERING COLLEGE
OUTLINE • Introduction • Piezoelectric Effect • Advantages of USM • Basic Principal • Fundamental construction • Types of USM • Working Mechanism • Application • Conclusion
Introduction • It has been known for more than 30 years. • The first ultrasonic motor was introduce by v.vlavrinko in 1965. • An Ultrasonic motor is a type of electric motor formed from the ultrasonic vibration of a component, the stator being placed against another, the rotor depending on the scheme of operation. • Conversion of electric energy into motion by inverse piezoelectric effect.
Introduction • To obtain the levels of torque speed characteristics of USM using conventional motors we require to add a gear system to reduce the speed. • These characteristics of USM makes them attractive for robotic applications where small motions are required. • This motor achieves high speed and drive forces, while still permitting the moving part to be positioned with high accuracy.
What is Piezoelectric Effect? The piezoelectric effect is understood as the linear electromechanical interaction between the mechanical and the electrical state in crystalline materials with no inversion symmetry. • Piezoelectricity – generation of voltage in response of mechanical stress. • The word is derived from the Greek piezein, which means to squeeze or press. • This effect is also reversible. • Deformation is only 0.1 % of the original dimension. • Piezoelectric material- quartz(SiO2), barium titanate (BaTiO3) lead zirconatetitanate and occasionally lithium niobate .
Advantage of Piezoelectric Motor • Electromagnetic motors are notorious for consuming high amount of power and creating high ambient motor temperatures respect to USM • The electromagnetic motors produce strong magnetic fields which cause interference. Ultrasonic motors use piezoelectric effect and hence no magnetic interference. • Electromagnetic motor has high input to output energy loss ratios • USM High positional accuracy respect to Electromagnetic Motor. Vs.
How !t Looks… Piezoelectric Actuator Rotor
Basic Principle • Generation of gross mechanical motion through the amplification and repetition of micro-deformations of active material. • The active material induces an orbital motion of the stator at the rotor contact points . • Frictional interface between the rotor and stator rectifies the micro-motion to produce macro-motion of the ROTOR. • Working frequency-20 KHz to 10 MHz • Amplitude of the actuator motion – 20 to 200nm
Construction Fundamental Construction of USM
Standing Wave USM • Mechanism • This type of motors use three groups of crystals: two of which are Locking and one Motive. • First, one group of locking crystals is activated — this gives one locked side and one unlocked side of the 'sandwich'. • Next, the motive crystal group is triggered and held — the expansion of this group moves the unlocked locking group along the motor path. This is the only stage where motor movement takes place.
Mechanism • This type of motor commonly known under the names of Inchworm, Piezo LEGS or PiezoWalk motors
TRAVELING WAVE USM • Superposition of multiple standing wave create a traveling wave. • Representation of travelling wave U(x ,p)= A cos(k x) cos(wt) + A cos(k x - 90) cos (wt-90). • Phase difference is 90 degree
TRAVELING WAVE USM • The active material excites a traveling flexural wave within the stator that leads to elliptical motion of the surface particles. • Teeth are used to enhance the speed that is associated with the propelling effect of these particles. • The rectification of the micro-motion an interface is provided by pressing the rotor on top of the stator and the frictional force between the two causes the rotor to spin.
MAJOR APPLICATION • Camera auto focus lenses • Driving fluid • Watch motors and compact paper handling. • Optoelectronics area • In micro surgery and sensor scanning.
Conclusion Hence the ultrasonic motors, which is a new step in the miniaturized electrical technology has got many applications in small appliances because of its high torque at low density.