Chapter 4. Partition
This chapter presents a method for finding the maximum independent set in intersection disk graphs defined in the Euclidean plane. By organizing disks into multiple layers and utilizing dynamic programming, we can optimize the computation of independent sets. The approach considers the diameter of disks and restricts evaluations to relevant cells in the layers. A recursive relation allows efficient calculation, leading to a performance ratio for approximation solutions. This strategy provides a clear pathway for dealing with complexities in disk intersection problems.

Chapter 4. Partition
E N D
Presentation Transcript
Chapter 4. Partition Ding-Zhu Du (2) Multi-layer Partition
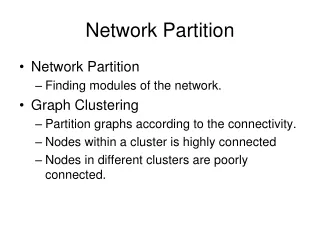
Intersection Disk Graph Consider n points in the Euclidean plane, each is associated with a disk. An edge exists between two points if and only if their associated disks have nonempty intersection.
Maximum Independent Set in Intersection Disk Graph Given a intersection disk graph D, find a maximum Independent set opt(D).
Multi-layer Suppose the largest disk has diameter 1-ε. Let dmin be The diameter of smallest disk. Fix an integer k > 0. Let Put all disks into m+1 layers. For 0 < j < m, layer j consists of all disks with diameter di,
Layer j Layer j+1
A disk hits a cut line. At each layer, a disk can hit at most one among Parallel lines apart each other with distance .
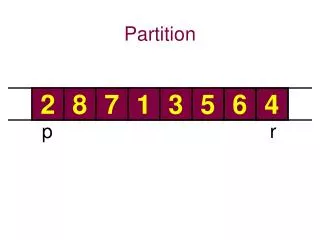
D(a,b) In partition P(a,b), delete all disks each hitting a cut line in the same layer. The remaining disks form a collection D(a,b). Maximum Independent set opt(D(a,b)) can be computed in time Why use it? by dynamic programming.
Dynamic Programming j-cell is a cell in layer j. For any j-cell S and a set I of independent disks in layers < j, intersecting S, Table(S,I) = maximum independent set of disks layers > j, contained in S, and disjoint from I. opt(D(a, b)) = US Table(S, Ǿ) where S is over all cells in layer 0.
Recursive Relation For j-cell S and I,
# of Table(S,I) # of S = too large How do we overcome this difficulty? Relevant cell: A j-cell is relevant if it contains a disk in layer j.
Dynamic Programming j-cell is a cell in layer j. For any relevant j-cell S and a set I of independent disks in layers < j, intersecting S, Table(S,I) = maximum independent set of disks layers > j, contained in S, and disjoint from I. opt(D(a, b)) = USTable(S, Ǿ) where S is over all maximal relevant cells.
Children of a relevant cell S S’’ S’
Maximal relevant cell A relevant cell is maximal if it is not contained by Another relevant cell.
Recursive Relation For j-cell S,
# of Table(S,I) # of relevant S = n. # of I = # of Table(S,I) =
# of I S # of I’s =
Computation Time of Recursion # of S’ = # of J = Time = Running Time of dynamic programming
# of J S
(1+ε)-Approximation Choose k = ?. Compute opt(D(0,0)), opt(D(1,1)), …, opt(D(k-1,k-1). Choose maximum one among them.
Analysis • Consider an optimal solution D*. • For each partition P(a,b), let H(a,b) be the collection of all disks hitting cut line in the same layer. • Estimate |H(0,0)|+|H(1,1)|+···+|H(k-1,k-1)|.
|H(0,0)|+|H(1,1)|+···+|H(k-1,k-1)| Each disk appears in at most two terms in this sum. There exists i such that |H(2i,2i)| < 2|D*|/k.
Performance ratio Opt/approx =1/(1-2/k) = 1 + 2/(k-4) Choose We obtain a (1+ε)-approximation With time