Understanding Digital Image Transformation and Camera Geometry
Review of basic geometry essential for vision, graphics, and robotics, exploring how 3D points are transformed into 2D images with brightness determined by reflectance and radiometry. Learn about camera modeling, intrinsic/extrinsic parameters, and affine geometry concepts.

Understanding Digital Image Transformation and Camera Geometry
E N D
Presentation Transcript
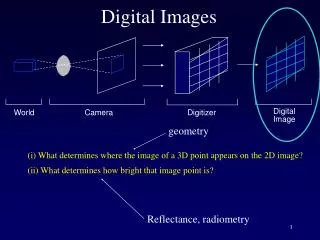
Digital Images World Camera Digitizer Digital Image geometry (i) What determines where the image of a 3D point appears on the 2D image? (ii) What determines how bright that image point is? Reflectance, radiometry
Review of some basic geometry(compulsary for vision, graphics and robotics) Two different interpretations: • change of coordinate system: • the same pt in two different systems oxy and ox’y’ • point transfomation: • a point (x,y) is transformed (translated) into (x’,y’) • within the same coordinate frame
2D general Euclidean transformation: R is a rotation matrix=orthonormal = orthogonal and unit vectors, 2*2 matrix (only 1 d.o.f.) such that
3D Euclidean transformation: One example of R might be: Different sign
One step further …vector, affine, and Euclidean spaces Naturally everything starts from the known vector space • add two vectors • multiply any vector by any scalar • zero vector – origin • finite basis
Affine geometry and affine coordinates: E1 and e2 are any noncolinear vectors, not necessarily orthogonal unit ones No more rotation as no perpendicularity (as no dot prod.)
Distances -- eucl. Coord Angles, ortho Ratios – affine coord. parallelism Dot product Linear dependency
Given 3 points (2 vectors) on the plane, we can define an affine coordinate frame (affine basis), Any 4th point can be expressed in terms of affine coordinates …
X’ P3 u X u’ u v O P2 Geometric modeling of a camera How to relate a 3D point X (in oxyz) to a 2D point in pixels (u,v)?
Abstract camera model - box with a small hole in it Pinhole cameras work in practice Pinhole cameras
each set of parallel lines (=direction) meets at a different point The vanishing point for this direction Sets of parallel lines on the same plane lead to collinear vanishing points. The line is called the horizon for that plane Good ways to spot faked images scale and perspective don’t work vanishing points behave badly supermarket tabloids are a great source. Vanishing points:
Vector space to affine: isomorph, one-to-one (pt=vector) • vector to Euclidean as an enrichment: scalar prod. Pts, lines, parallelism Angle, distances, circles
Z u Y y X x X f x v O Camera coordinate frame
Z u u y Y y X x o x X f x v v O Image coordinate frame
Image coordiante frame: intrinsic parameters If u not perpendicular to v, but an angle alpha:
5 intrinsic parameters • Focal length in horizontal/vertical pixels (2) • (or focal length in pixels + aspect ratio) • the principal point (2) • the skew (1) one rough example: 135 film In practice, for most of CCD cameras: • alpha u = alpha v i.e. aspect ratio=1 • alpha = 90 i.e. skew s=0 • (u0,v0) the middle of the image • only focal length in pixels?
Z Zw u Y Xw Yw y X x X f x v O World (object) coordinate frame Xw
6 extrinsic parameters World coordinate frame: extrinsic parameters Relation between the abstract algebraic and geometric models is in the intrinsic/extrinsic parameters!
Finally, we have a map from a space pt (X,Y,Z) to a pixel (u,v) by Finally, we should count properly ...
Summary of camera modelling • 3 coordinate frame • projection matrix • decomposition • intrinsic/extrinsic param