Piloting
Piloting. Symbol Summary. Precision vs. Accuracy. What you attempt to do Charts, Tools, Plotting, compass scale, decimal minutes of L, Lo … vs. What you can expect to realize Helmsmanship, Compass performance, Effects of the sea and weather Helmsmanship

Piloting
E N D
Presentation Transcript
Precision vs. Accuracy • What you attempt to do • Charts, Tools, Plotting, compass scale, decimal minutes of L, Lo • … vs. • What you can expect to realize • Helmsmanship, Compass performance, Effects of the sea and weather • Helmsmanship • Largest factor in reaching destination • Boat response to seas • Attention to the helm • Avoiding other boats
Typical Accuracy Factors • Plotting • 1° is achievable • Helmsmanship • 3° may be practical • Compass • 2° should be expected • Averages out to about 4° • 4° error = 424 ft in a nm run = .7 nm in 10 nm run
Piloting • Maintain chart plot • Planned course (leg) • Speed • Plot GPS fix nominally at hourly intervals • Verify by other means • More frequent if conditions warrant • THIS FIX MAY BE THE ONLY REFERENCE YOU HAVE IN THE EVENT OF A GPS FAILURE • Annotate any significant information • On the chart or notepad • Problems, emergency radio calls, etc.
Piloting • Positioning Standards • Plot to nearest degree • Steer to within 2° • Speed noted to nearest 2 significant digits • e.g., 4.5 Kn, 15 Kn • Depth to nearest foot • Distance to nearest 1/10 nm • Fix time to nearest minute
Labeling Magnetic Planned Courses 1. Draw & Measure COURSE LINE carefully between points Destination 2. Label COURSE near starting point “C” (direction – 3 digits) C 080 M D 4.5 3. Label DISTANCE near mid-point “D” (nm + tenths) Start
Labeling DR Courses 1. Draw & Measure COURSE LINE carefully between points 2. Label COURSE near starting point “C” (direction – 3 digits) 1030 C 070 M 4. Plot & Label DR Position dot – half circle Time (4 digits on diagonal) 1000 S 6.0 3. Label SPEED near starting point “S” (Kn – 2 significant digits) D = (S x T) / 60 D = (6.0 X 30) / 60 D = 3.0 nm Plot while navigating
Plot & Label Bearing 1030 070 M
Bow Bearing 1030 070 M 070 M
Beam Bearing 070 M 90R 1030 160 M
Beam Bearing 1030 340 M 070 M 270R
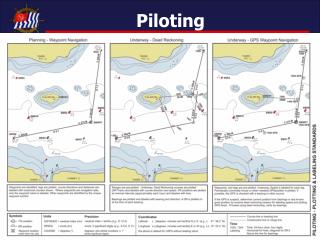
Plotting & Labeling Standards Waypoint Planning SRTWR All charted navigation aid (ATON’s) used as waypoints or possible position checks are identified. Waypoint symbol used when not charted navigation aid. Legs of planned cruise are plotted. MAGNETIC course direction labeled above line with reciprocal shown, to nearest whole degree, in three digits, using prefix “C”. Distance labeled below line midway between waypoints, to nearest tenth, using prefix “D”. Avoidance techniques plotted and labeled (taught in Advanced Piloting), including cross-track error; danger circles; danger bearings; and radar avoidance circles. BBWP3 SRR2 C284M C104M D 6.2 C194M C178M NLT 026M BBWP2 SRG1 XTE D 0.2 CIB D 4.2 NLT D0.5 D 4.6 C358M BBR8 Radar NLT D 1.0 CPRG BBR10 C014M C231M C271M BBWP1 D 2.6 D 6.7 C051M C081M ORRW BBG7 BBG9
Plotting & Labeling Standards Waypoint Navigation SRTWR Waypoints, legs, course, distance and avoidance areas have been pre-plotted. Underway, as you depart/arrive at each waypoint, circle point and label times parallel to bottom of chart in 4 digits using 24-hour clock. Speed is labeled for each leg, near the beginning of each course line, in 2 significant digits, using prefix “S”. Hourly or when needed unless you are off-course outside your pre-qualified distance, a GPS position is plotted using fix symbol and labeled. It is not necessary to plot a new course line to next waypoint unless you are seriously off-course. If possible cross-check GPS with visual bearing and plot, labeling with time above bearing line and magnetic direction below. If the GPS is suspect, determine current position from bearings or last known good position by dead reckoning. BBWP3 1550 C284M C104M 1510 GPS S 10 SRR2 D 6.2 S 12 1500 GPS C194M C178M 1500 070M BBWP2 NLT 026M SRG1 XTE D 0.2 1600 307M CIB D 4.6 D 4.2 NLT D0.5 1600 GPS 1600 270M Radar NLT D 1.0 C358M BBR8 CPRG BBR10 1615 S 9.0 C014M C231M S4.0 C271M BBWP1 1420 GPS D 2.6 D 6.7 C051M 1400 GPS C081M 1400 130M ORRW BBG7 S 6.5 BBG9 1300 1650
Plotting & Labeling Standards Dead Reckoning Navigation Danger bearings and ranges would have been pre-plotted. Underway, dead reckoning courses (DR Track) are plotted from a known position in the direction of travel and labeled with course direction above the line and speed below. Visual bearing are plotted and labeled with time above bearing line and magnetic direction below. A DR position is plotted at the time of each bearing using the symbol and labeled with time diagonally. A DR position is plotted at the time of each course or speed change using the symbol and labeled with time diagonally. Fix positions are determined by multiple bearings or arrival at charted navigation aids and indicated with the symbol labeled with time parallel to the bottom of the chart. New DR tracks are begun only from fix positions. 1420 NLT 025M 1400 C 018M S 10 1400 320M 1400 250M 1400 C 350M S 10 1330 1341 1330 216M C 305M S 7.8 1300
Plotting & Labeling Standards Waypoint/DR Navigation SRTWR 1525 040M Should your electronics fail, you must be ready to revert to DR methods. Shortly after departing BBWP3 your GPS begins to display sporadic readings and completely fails at 1525. Determine current position from bearings or last known good position. Proceed using dead reckoning, verify by bearings. 1525 1525 270M BBWP3 1525 C284M C104M C205M S 10 1510 GPS S 10 SRR2 D 6.2 1500 GPS C194M C178M 1500 070M BBWP2 NLT 026M SRG1 XTE D 0.2 CIB D 4.6 D 4.2 NLT D0.5 Radar NLT D 1.0 C358M BBR8 CPRG 1555 BBR10 S 9.0 C014M C231M S 5.0 C271M BBWP1 1420 GPS D 2.6 D 6.7 C051M 1400 GPS C081M 1400 130M ORRW BBG7 S 6.5 BBG9 1300 ORR2 1630 ORG1 BCRW BCR2