Download
1 / 11
120 likes | 411 Vues
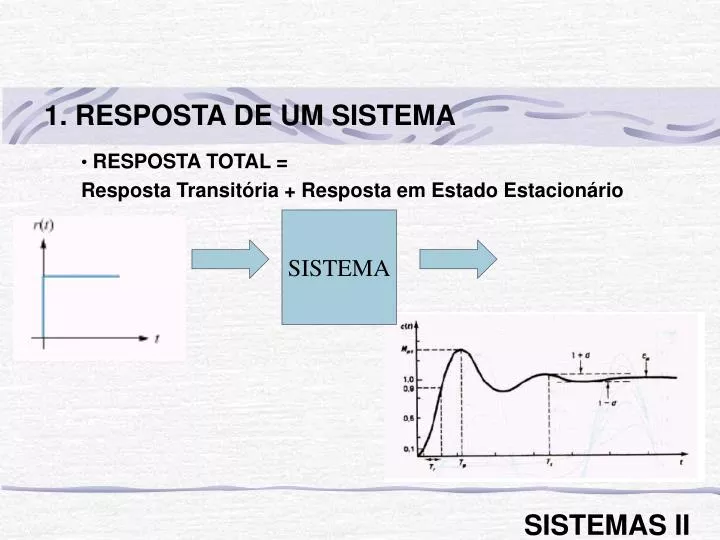
1. RESPOSTA DE UM SISTEMA. SISTEMA. RESPOSTA TOTAL = Resposta Transitória + Resposta em Estado Estacionário. SISTEMAS II. 2. DESEMPENHO ESTACIONÁRIO. PROPRIEDADES DA TRANSFORMADA DE LAPLACE: 1) Teorema do Valor Final: 2) Teorema do Valor Inicial:

E N D
1. RESPOSTA DE UM SISTEMA SISTEMA RESPOSTA TOTAL = Resposta Transitória + Resposta em Estado Estacionário SISTEMAS II
2. DESEMPENHO ESTACIONÁRIO PROPRIEDADES DA TRANSFORMADA DE LAPLACE: 1) Teorema do Valor Final: 2) Teorema do Valor Inicial: ERRO DE ESTADO ESTACIONÁRIO OU ERRO DE REGIME PERMANENTE: é a parte da Resposta Total que não se aproxima de zero quando o tempo tende para o infinito. SISTEMAS II
3.VARIAÇÃO PARAMÉTRICA: SENSIBILIDADE MALHA ABERTA: FTMA = G(s).H(s) = B(s) / E(s) RAMO DIRETO: FTRD = G(s) = C(s) / E(s) MALHA FECHADA: FTMF = C(s) / R(s) = G(s) / [1 + G(s).H(s)] Se H(s) = 1 FTMF = G(s) / [1 + G(s)] Se G(s) = [N(s) / D(s)] e H(s) = 1 FTMF = N(s) / [N(s) + D(s)] Se G(s).H(s) >> 1 FTMF 1 / H(s) 1) Sistemas em malha fechada apresentam grande insensibilidade a mudanças nas características dos elementos do ramo direto. 2) Mas, uma mudança na realimentação provocará uma variação correspondente na FTMF do sistema. SISTEMAS II
4. TIPO DO SISTEMA FTMA = G(s).H(s) = K (s - z1)(s - z2)...(s - zm) / [st (s - pt+1)(s - pt+2)...(s - pn)] onde: m < n (grau do numerador menor que grau do denominador) n = ordem do sistema t = número de integrações do erro = número de integradores (1/s) na FTMA t = 0 sistema do tipo 0 t = 1 sistema do tipo 1 t = 2 sistema do tipo 2 ... SISTEMAS II
5. ERRO DE REGIME PERMANENTE (RP) CONCEITO: É o erro de regime estacionário, ou seja, a diferença entre o sinal de saída desejado (especificado pelo sinal de referência de entrada) e o sinal de saída real que ocorre em RP. EXPRESSÃO DO ERRO: C(s) = E(s).G(s) C(s) / R(s) = G(s) / [1 + G(s).H(s)] C(s) = R(s).G(s) / [1 + G(s).H(s)] E(s).G(s) = R(s).G(s) / [1 + G(s).H(s)] E(s) / R(s) = 1 /[1 + G(s).H(s)] Ou: O erro de uma excitação qualquer depende unicamente da FTMA Se H(s) = 1 E(s) / R(s) = 1 / [1 + G(s)] SISTEMAS II
6. GENERALIZAÇÃO DO ERRO (erp) ERRO ESTACIONÁRIO = ERRO REGIME PERMANENTE E(s) = R(s) / [1 + G(s).H(s)] CÁLCULO DO ERRO EM REGIME PERMANENTE: Aplica-se o Teorema do Valor Final erp = lim e(t) = lim s. E(s) = lim s. R(s) / [1 + G(s).H(s)] t s 0 SISTEMAS II
7. EXCITAÇÃO PADRÃO ENTRADAS USUAIS: 3 tipos de excitações (englobam a maior parte dos sistemas de controle). 1) Degrau ou Salto Unitário: R(s) = 1 / s 2) Rampa Unitária: R(s) = 1 / s2 3) Parábola Unitária: R(s) = 1 / s3 SISTEMAS II
8. COEFICIENTE DE ERRO DE POSIÇÃO (Kp) ENTRADA: degrau unitário R(s) = 1 / s DENOMINAÇÃO: Coeficiente estático de erro de posição = Kp erp = 1 / (1 + Kp) Sistema tipo O: erp = 1 / (1 + K) Sistema tipo 1: erp 0 Sistema tipo 2: erp 0 CONCLUSÕES: 1) Um sistema tipo 0 não é capaz de rastrear um degrau quanto maior K, menor é o erro. 2) Sistemas 1, 2, etc são capazes de rastrear um degrau. SISTEMAS II
9. COEFICIENTE DE ERRO VELOCIDADE (Kv) ENTRADA: rampa unitária R(s) = 1 / s2 DENOMINAÇÃO: Coeficiente estático de erro de velocidade = Kv erp = 1 / Kv Sistema tipo O: erp Sistema tipo 1: erp = 1 / K Sistema tipo 2: erp 0 CONCLUSÃO: 1) Somente um sistema tipo 2 é capaz de rastrear uma rampa. SISTEMAS II
10. COEFICIENTE DE ERRO ACELERAÇÃO (Ka) ENTRADA: parábola unitária R(s) = 1 / s3 DENOMINAÇÃO: Coeficiente estático de erro de aceleração = Ka erp = 1 / Ka Sistema tipo O: erp Sistema tipo 1: erp Sistema tipo 2: erp = 1 /K Sistema tipo 3: erp 0 CONCLUSÃO: 1) Somente um sistema tipo 3 é capaz de rastrear uma parábola. SISTEMAS II
11. RESUMO: ERRO ESTACIONÁRIO O erro estacionário (erp) dá uma idéia da qualidade do sistema. GENERALIZANDO: para qualquer estímulo, que tiver Transformada de Laplace, se desejarmos erro estacionário nulo, basta colocarmos na FTMA os mesmos pólos do estímulo. SISTEMAS II







![Resposta da questão 37: [C]](https://cdn2.slideserve.com/3665653/slide1-dt.jpg)