Download
1 / 12
120 likes | 240 Vues
This research explores the extension of Timing Definition Language (TDL) used in embedded systems, addressing high-priority interrupts. We delve into the Logical Execution Time (LET) semantics of TDL and the necessity of worst-case execution time (WCET) in ensuring accurate task invocation timings. Various modes and communication strategies are discussed for deeply embedded hardware. We analyze challenges related to asynchronous tasks, timing domains, and how interrupts can be leveraged for precise execution. This aims to enhance performance in cost-sensitive embedded applications.

E N D
Extending the Timing Definition Language with High Priority Interrupts Software & Systems Research Center (SRC) University of Salzburg Peter Hintenaus, Patricia Derler, Wolfgang Pree, Josef Templ Synchron 09
Background • Deeply Embedded Hardware (Board Level) • Embedded Software
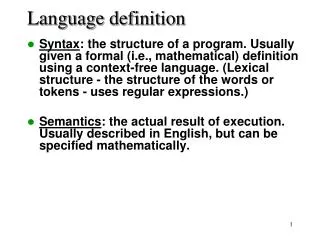
Timing Definition Language Based on Giotto [Henzinger, Kirsch] Logical Execution Time (LET) Semantics Multiple modes WCET required terminate Logical Execution Time (LET) Logical task invocation time Physical start suspend resume stop (ET) stop (WCET)
Timing Definition Language: Transparent Distribution communicationwindow communicationwindow Local execution and bus have to be synchronized! 5 ms Sender t inc inc inc inc ECU1 stop (WCET) stop (WCET) Receiver clientTask clientTask ECU2 10 ms
Timing Definition Language: Asynchronous Extension Asynchronous Tasks triggered by • Interrupts • Input Port Updates No timing guaranties for asynchronous tasks Implemented using interrupt service routines a registry and lock-free synchronization Mode Start Mode End Mode Period Logical task invoc. 1 task invoc. 2 time Physical
Flexray @ 1kHz Control @ 15kHz M Several Timing Domains Need to be able to specify timing domain! +
Asynchronous Events I Sampling • Fixed Interval • Well behaved • Guaranties • Costly when fast reactions required Polling • Check whenever convenient • Well behaved • Cheap • No guaranties
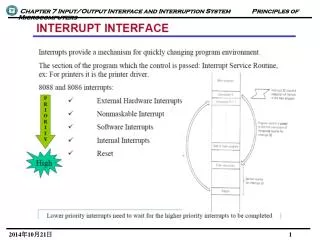
Asynchronous Events II Interrupts • Very fast reaction possible • Together with timer hardware precise and robust timing possible • Extremely hard to harness
Interrupts I Precisely timed execution scheduled at the beginning of the LET of a synchronous task Mode Start Mode End Mode Period task invoc. 1 task invoc. 2 time Interrupt Interrupt • Deadline • Maximum delay?
Interrupts II Event originating in another timing domain • Deadline • Minimum interarrival time
Impact on Synchronous Tasks Specify • LET • Rate • Start within mode period • Jitter
Open Work / Questions • Language extensions • Can this have a reasonable semantics? • Is transparent distribution possible with asynchronous networks? • Is this powerful enough for cost sensitive, deeply embedded applications? • Sample applications, e.g. make PMSM turn, both in simulation and reality