Geometric Method for Object Detection Optimization
A detailed procedure utilizing geometry methods to optimize object detection results through cost functions and layout comparisons. Results for various classes pre and post optimization included. Conclusions and goals for future improvements highlighted.


Geometric Method for Object Detection Optimization
E N D
Presentation Transcript
Week 8:Web-Assisted Object Detection Alejandro Torroella & Amir R. zamir
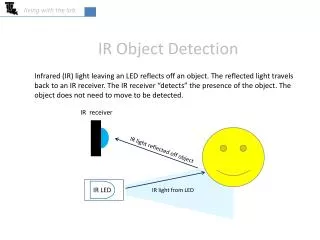
Geometry Method procedure • For each query image we manually set orientation, angle of view, range of view, and location of camera. : Camera location : Object locations : Field of vision
Geometry Method procedure Using the obtained FOV, select only the objects that are within the FOV Calculate the degrees from the left limit of the FOV and store in a vector specific to the object’s class These vectors will be our “true” layout of objects. . . .
Geometry Method procedure We then run our DPM detectors for the classes in question on the query image. Below are results for Street Lights (green) and Traffic Signals (red).
Geometry Method procedure We sift through the detections that completely disagree with the “true” GIS layout.
Geometry Method procedure We then sift through the detections again by size of bounding boxes (too large or too small)
Geometry Method procedure Using the sifted bounding boxes we generate all possible combinations (no repeats, order doesn’t matter) of possible layouts. For each class: Out of the N detections, choose k of them for the possible layout. Where For each layout combination we calculate the “cost” of it compared to the obtained “true” GIS layout and keep track of the combination that returned the minimum Two cost functions we’ve tested: Absolute value: Standard deviation:
Geometry Method procedure Once we’ve traversed through all the possible combinations, we display the detections that resulted in the minimum of the cost function.
Geometry Method results: Before Traffic Signals Trash Cans Traffic Signs
Geometry Method results: After GIS Sift Traffic Signals Trash Cans Traffic Signs
Geometry Method results: After Size Sift Traffic Signals Trash Cans Traffic Signs
Geometry Method results: After Fusion (abs) Traffic Signals Trash Cans Traffic Signs
Geometry Method results: after Fusion (std) Traffic Signals Trash Cans Traffic Signs
Geometry Method results: Before Traffic Signals Street Lights
Geometry Method results: After GIS Sift Traffic Signals Street Lights
Geometry Method results: After Size Sift Traffic Signals Street Lights
Geometry Method results: After Fusion (abs) Traffic Signals Street Lights
Geometry Method results: after Fusion (std) Traffic Signals Street Lights
Geometry Method results: Before Street Lights Traffic Signs
Geometry Method results: After GIS Sift Street Lights Traffic Signs
Geometry Method results: After Size Sift Street Lights Traffic Signs
Geometry Method results: After Fusion (abs) Street Lights Traffic Signs
Geometry Method results: after Fusion (std) Street Lights Traffic Signs
Geometry Method results: Before Traffic Signals Street Lights
Geometry Method results: After GIS Sift Traffic Signals Street Lights
Geometry Method results: After Size Sift Traffic Signals Street Lights
Geometry Method results: After Fusion (abs) Traffic Signals Street Lights
Geometry Method results: after Fusion (std) Traffic Signals Street Lights
Geometry Method results: Before Traffic Signals Street Lights
Geometry Method results: After GIS Sift Traffic Signals Street Lights
Geometry Method results: After Size Sift Traffic Signals Street Lights
Geometry Method results: After Fusion (abs) Traffic Signals Street Lights
Geometry Method results: after Fusion (std) Traffic Signals Street Lights
Geometry Method results: Before Fire Hydrants Street Lights
Geometry Method results: After GIS Sift Fire Hydrants Street Lights
Geometry Method results: After Size Sift Fire Hydrants Street Lights
Geometry Method results: After Fusion (abs) Fire Hydrants Street Lights
Geometry Method results: after Fusion (std) Fire Hydrants Street Lights
Geometry Method results: Before Street Lights Traffic Signs
Geometry Method results: After GIS Sift Street Lights Traffic Signs
Geometry Method results: After Size Sift Street Lights Traffic Signs
Geometry Method results: After Fusion (abs) Street Lights Traffic Signs
Geometry Method results: after Fusion (std) Street Lights Traffic Signs
Geometry Method results: Before Traffic Signals Traffic Signs
Geometry Method results: After GIS Sift Traffic Signals Traffic Signs
Geometry Method results: After Size Sift Traffic Signals Traffic Signs
Geometry Method results: After Fusion (abs) Traffic Signals Traffic Signs
Geometry Method results: after Fusion (std) Traffic Signals Traffic Signs
Geometry method Conclusions • Using the Standard deviation cost function resulted in better results compared to the Absolute value function on average. • A more advanced cost function would probably result in even better results • Results look promising considering we haven’t implemented a robust sensor model for creating the “true” GIS layout
Goals for next week • Implement a robust sensor model • Look into more advanced cost functions • Instead of crudely sifting through the bounding boxes by size using a threshold based on the size of the image, use the distances of the objects from the camera to estimate how large the bounding box should be.