Download
1 / 17
170 likes | 260 Vues
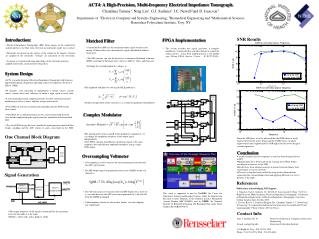
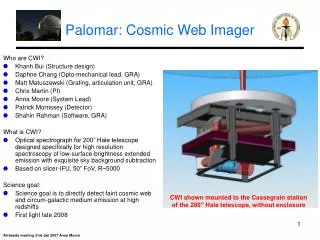
The Palomar Tomograph (PT) is a compact wavefront sensor system with multiple features for advanced wavefront sensing. It includes high-performance sensors, data storage capabilities, optical train design, and control interfaces.

E N D
Palomar Tomograph V. Velur1, B. Platt2, M. Britton1, R. Dekany1 1 Caltech Optical Observatories, California Institute of Technology 2 Interferometry and Large Optics, Jet Propulsion Laboratory
Introduction: • Palomar Tomograph (PT) is a compact multiple guide star wavefront sensor system that can be used to confirm tomographic wavefront sensing algorithms • 4 Hartmann Shack low noise CCD based wavefront sensors (three 16x16 sub-apertures, one 3x3 sub-aperture) excluding the PALAO active high order wavefront sensor. • PALAO also has a dedicated 16x16 SHWFS that feeds data to a real time computer
The “bird-of-prey” (BoP) Focusing lens Field lens Lenslet array collimator Penta prism
A single Hartmann Shack WFS channel Scimeasure’s Little Joe Camera with CCD39 chip XY stage and sleeve
Spots on the focal plane array:(4x4 pixels/sub-ap., 16x16 spots aligned FPA with >0.1 pixel RMS offset) http://eraserhead.caltech.edu/palomar/MGSU/lab_data/lab.html
Salient features of the PT • The system can be used with the PALAO tip-tilt and high order AO loop closed or with both or either being open using low noise CCD based SHWFS. We can record data 50-2000 Hz. • 3.2 Terabytes of total data storage space with two SCSI Ultra 160/RAID on two striped RAID disks that can record data at 2000 Hz from 4 cameras acquiring 14 bit data from 64x64 pixels. Data is compressed using custom lossless compression format and can be extracted to fits image with time tags. • BoPs can acquire guide stars over a continuous 90 arc-sec. diameter field. The optical train is designed to be telecentric over this range so that pupil shear is >1.2% (2 microns) at the lenslet pupil (size=1.728 mm) over the FoV. • Linux based camera control interface and motion control. All control schemes are written in C/C++. All control code is checked into CVS repository with version control. Documentation and user manuals that are available via. www. ssh-agent, ssh-add help us to talk to all cameras from one shell. • A 5 ft high commercial 19” rack is populated with a KVM, a 1U rack mounted monitor, 10 Mbps network link, a network power switch etc for ease of operation. Newport’s latest LTA series high speed actuators used to pick off guide stars with one motor controller controlling all 8 axes. • A custom timing module can be used to trigger as many as 6 cameras to run at integral frame rates in a synchronous fashion. This can be used when guide stars are of different brightness or to study variations in time of the wavefront sensed from each pick off arm.
Performance • We have successfully locked on a Tempel 1 (18 magnitude comet (extended object)) at 2.0 air-masses with the 3x3 SHWFS built in the same fashion. • PALAO HOWFS performance Bright guide star Strehls as high as 80% at 2.2 mm Maximum frame rate 2000Hz (<7e- read noise) Limiting magnitude ~13.5mV, 10-15% Strehl at 2.2 mm Read noise 3.5e- at < 500 fps Mean Wavefront 165 nm • Typical read noise for e2V’s CCD 39 chips is 3e-s at 500 Hz and 7e-s at 2000 Hz • In parallel - Matthew’s work on modeling anisoplatism
Combined measurement error and fitting error vs. sub-ap. Diameter, for ro(0.5 micron) =0.15 m, 3e-s of read noise and system transmission=0.36. (Each curve is truncated by fitting error term, indicating that there is no star brightness that results in that level of wavefront measurement error.) Measurement error vs. sub-ap diameter, for ro(0.5 micron) =0.15 m, 3e-s of read noise and system transmission=0.36 After R. Dekany et al., 2001 Beyond conventional adaptive optics, Venice, Italy
Laboratory set-up: collimator iris CCD camera w/ BoP Point source Focusing lens Alignment telescope Axis defining iris holder F#15.4 focus
Custom BoP alignment jig: Lockable XY and focus stage Gimbal mount 5 axis stage 5 axis stage
Camera simulator with reticle: Grid to simulate CCD pixels
Camera controllers and data recording: CCD camera controllers Network power switch KVM video switch 8 axis motor controller 1U rack-mountable monitor 3 x dell 1U PCs with SCSI HDD and Ultra SCSI 160 port 3.2 Terabyte RAID array
Current status: • 3 BoPs aligned individually • The data acquisition system is ready with synchronous recording capability To do: • Mount the 4 BoPs in the MGSU cage • Mount penta prisms and align • Solve frame rate issues with cameras. • 7 work days of installation schedule (JPL – Chris Shelton and Jennifer Roberts)
Web-site/ documentation: http://eraserhead.caltech.edu/palomar/MGSU/MGSU.html