
Inductive Magnetic Repulsion and Levitation Using a Halbach Array
This study explores the repulsion phenomenon between a circular Halbach array composed of Nd magnets and a circular arrangement of inductive copper coils. The unique configuration of the Halbach array intensifies the magnetic field on one side, leading to the generation of eddy currents in the coils as the array is spun. These currents create a magnetic field that can yield repulsion strong enough to overcome gravity, facilitating potential levitation. Challenges remain in achieving optimal dynamic balance for effective levitation.

Inductive Magnetic Repulsion and Levitation Using a Halbach Array
E N D
Presentation Transcript
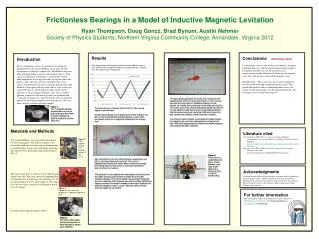
Introduction We are conducting a series of experiments involving the repulsion between a circular Halbach array and a circular arrangement of inductive copper coils. The Halbach array was built with particularly magnetizes Nd magnets (Fig 1). Their specific arrangement concentrates a sinusoidally variable dodecamagnet on the strong side while leaving the other side much weaker. The coils are then suspended from a force sensor, which measures the force of gravity pulling down. The Halbach is then spun, with the strong side as close to the coils as possible (Fig. 4), which generates eddy currents in the inductive coils according to Faraday’s Law. These currents generate a magnetic field which provides for repulsion and, eventually, levitation. It is expected that the force of repulsion upward will be strong enough to overcome gravity if the two pieces relative velocities are high enough. Acknowledgments We thank Walerian Majewski for laboratory assistance, Robert Woodke for machine shop assistance, and Data Studio for statistical observations. Funding for this project was provided by grants received by the Society of Physics Students as well as the Northern Virginia Community College Educational Foundation. Results After organizing the Nd magnets into the circular Halbach array, it was noticed that the magnetic field on the strong side was stronger than the magnets were individually. Conclusions (Helvetica, 44 pt.) In conclusion, we have merely witnessed inductive magnetic repulsion; however, with the proper improvements magnetic levitation is possible. One of the major necessary improvements includes dynamically balancing the magnetic array. Once this has been achieved the magnetic array blah blah blah.....This section was all be altered should any tests be conducted using a modified magnetic array. That would then push the above acknowledgements over to the results section and possibly even the materials/methods. Also levitation may have then been achieved. Literature cited Tosney, Kathryn 2006. How to create a poster that graphically communicates your message. Professor of Biology-The University of Michigan. http://www.biology.lsa.umich.edu/research/labs/ktosney/file/PostersHome.html Ritchison, Gary 2006. Guidelines for poster presentations. Scientific Literature and writing. http://www.biology.eku.edu/RITCHISO/posterpres.html For further information More information on this and related projects can be obtained by contacting wmajewski@nvcc.edu or thomps55@illinois.edu or visiting www.spsnational.org Frictionless Bearings in a Model of Inductive Magnetic Levitation Ryan Thompson, Doug Goncz, Brad Bynum, Austin NehmerSociety of Physics Students, Northern Virginia Community College, Annandale, Virginia 2012 The above graph epitomizes the results of our hard work and experimenting. While this chart shows Force vs. Time, one can also infer this to be Force vs. Rotational Velocity. As time passed, the velocity was consistently increased by pressing the “Up” button about every second. After about sixteen seconds this run was aborted as well due to stress on the rotating machine. Had this process continued, achieving 4,000 rpm at about the forty second mark levitation should have been recorded. In the future we plan to obtain a more powerful rotator, balance the Halbach array, and more stable guidance system for the coils. With these improvements our final results will be improved, and levitation should be achieved. Figure 1. The 12 magnets alternate magnetizations so that the face shown goes from North to counter clockwise to South to clockwise and then starts over. The weak side has a magnetic field of only 0.3 Tesla, varying slightly around the base. During experimentation it was noticed that the force acting on the force sensor oscillated back and forth between a value which was greater and lesser in magnitude compared to the average force. After restricting the coils from spinning and/or swaying back and forth, a more desirable result was found. This result is highlighted by the pink lines shown above in which the average force acting upon the force sensor is eventually reduced by a factor of almost four newtons. Materials and Methods The circular Halbach was constructed using twelve 0.6 Tesla Nd magnets. Ten of these magnets were inserted by hand into a circular ring of aluminum and secured into place using screws around the outer ring. The final two were positioned using a half ton press (Fig. 2). The ring of coils (Fig. 3) consists of five eighteen gage copper wire coils. Each ring consists of approximately two hundred turns and have an outer diameter of 1.25” an inner diameter of 0.75” and a height of 1.00”. These five coils were then secured to a non magnetic board every 72 degrees. A rotator used to spin the magnets (Fig 4). Figure 2. Final magnet forced into position using 1/2 ton press. Figure 6. Force sensor is suspending coils above circular Halbach array. Clips shown apply only a horizontal force in order to prevent sway. This particular run was aborted after about eighty seconds because the rotator and coil system became unstable due to the high rotational velocities. This lack of stability may have been increased due to an imbalance of the magnets spun with the rotator. Without the magnets attached, the rotator is capable of spinning at 4,000 rpm but when the complete system is set up 1,500 rpm seems to be the maximum speed we can achieve. Figure 3. Inductive Coils, each coil completes a separate loop within itself. Figure 4. Our rotator, which plugs into the wall and spins in either direction at speeds up to 4,000 rpm.





