Download
1 / 33
330 likes | 436 Vues
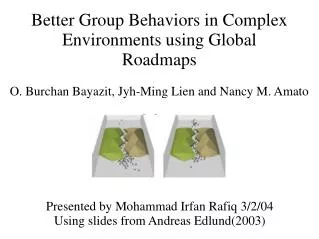
Explore the application of global roadmaps for simulating group behaviors, including homing, goal searching, narrow passage, and shepherding behaviors in complex environments. Learn about the boids approach, potential fields, pathway optimization methods, and more. Experimental results and performance evaluations are discussed to highlight the effectiveness of using roadmaps for group simulations.

E N D
O. Burchan Bayazit, Jyh-Ming Lien and Nancy M. Amato Better Group Behaviors in Complex Environments using Global Roadmaps Andreas Edlund <andreas.edlund@stanford.edu>
Introduction • Flocks and crowds. • Craig Raynolds' “boids”, SIGGRAPH'87 • Presented a distributed approach to simulate flocks of individuals.
So what's it used for? • Artificial life. • Explores how various lifeforms behave in larger groups. • Animation. • Used in movies and computer games. • Tim Burton's film “Batman Returns” used a modified version of Raynolds' boids to simulate a swarm of bats and a flock of penguins.
This paper • Behaviour: • Homing Behaviour. • Goal Searching Behaviour. • Narrow Passage Behaviour. • Shepherding Behaviour. • Approaches: • Basic potential field. • Grid based A*. • Rule based roadmap.
Boids • Individuals use “boid”-behaviour. • Avoid collision with flockmates. • Match velocity with flockmates. • Stay close to flockmates. Alignment Separation Cohesion
Global behaviour • Global behaviour is simulated using a potential field. Two force vectors used: • Towards the goal. • Away from obstacles. Boid Goal
Various approaches • Problem with local minima. • Two methods to solve this problem: • Grid based A* search. • Finds shortest paths and is relatively fast. • However, we need to recompute a new path every time we have a new goal. • Roadmap. • Precompute a roadmap for the environment and use it for all the queries.
Homing Behaviour • Search the roadmap to find a path to the goal. • Each node on this path is considered a subgoal. • The flock is attracted to the next subgoal instead of the final goal.
Goal Searching Behaviour • Environment is known, the goal is not. • Objective is to find the goal and get everyone to it. • Tries to duplicate ant behaviour. • Ants drop pheromone on paths to indicate the importance of that particular path. • More ants will walk down paths that are considered more important.
Goal Searching Behaviour Ants Goal
Narrow Passage Behaviour • A naive way is to simply use the homing behaviour.
Narrow Passage Behaviour • We'll get problems with congestion though. • It would be better if the ants formed some kind of queue.
Narrow Passage Behaviour • The paper proposes a “follow-the-leader” strategy: • Move to the passage using the homing behaviour. • At the entrance node select the ant closest to the entrance and designate that ant the “leader”. The other ants are “followers”. • The leader's subgoal is the next node in the narrow path. • The other ants line up behind each other and uses the ant in front of him as his subgoal.
Narrow Passage Behaviour • Select a leader.
Narrow Passage Behaviour • Select the first follower.
Narrow Passage Behaviour • Select the the next follower.
Narrow Passage Behaviour • And so on ...
Shepherding Behaviour • The sheep have boid behaviour. • The sheep dog repels the sheep by a certain amount of force. Dog Goal Sheep
Shepherding Behaviour • The herd is continuously grouped into subgroups based on the sheep's positions. Subgroup Another subgroup
Shepherding Behaviour • Dog always herds the subgroup that is the farthest away from the subgoal. Subgoal
Shepherding Behaviour • Algorithm based on an experiment with actual geese. • From Richard Vaughan, 2000.
Experimental Results • Homing behaviour: • Basic versus grid based A* versus MAPRM. • 301 random obstacles. • 30 s runtime.
Experimental Results • Homing behaviour:
Experimental Results • Goal Searching behaviour: • 16 obstacles occupies 24 % of the environment. • 50 flock members. • Sensory radius: 5 m. • 80 x 100 m environment.
Experimental Results • Narrow passage behaviour: • Naive homing behaviour versus follow-the-leader. • 50 flock members. • One narrow passage between two mountains.
Experimental Results • Narrow passage behaviour:
Experimental Results • Shepherd behaviour: • Grid based A* versus roadmap. • 30 sheep.
Experimental Results • Shepherd behaviour: • Comparison between different strength of the sheep dog's repulsive force.
Conclusions and rants • Roadmap is better than basic and A* (what a surprise). • Faster and few local mimima. • Rants: • Algorithms poorly described. • What's up with the narrow passage experiment? • Escape from local minima?
Further reading • Boids • Craig Raynolds, “Flocks, Herds, and Schools: A Distributed Behavioral Model”, SIGGRAPH'87 • Shepherding • Richard Vaughan, Neil Sumpter, Jane Henderson, Andy Frost and Stephen Cameron, “Experiments in automatic flock control”, 2000