Kinematics in Two Dimensions
Kinematics in Two Dimensions. Chapter 3. Expectations. After Chapter 3, students will: generalize the concepts of displacement, velocity, and acceleration from one to two dimensions use the projectile-motion principle to analyze two-dimensional constant-acceleration problems

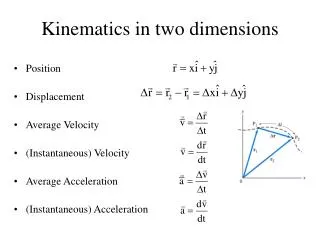
Kinematics in Two Dimensions
E N D
Presentation Transcript
Kinematics in Two Dimensions Chapter 3
Expectations After Chapter 3, students will: • generalize the concepts of displacement, velocity, and acceleration from one to two dimensions • use the projectile-motion principle to analyze two-dimensional constant-acceleration problems • apply the kinematic equations to solve constant-acceleration problems in two dimensions • add relative velocities in two dimensions
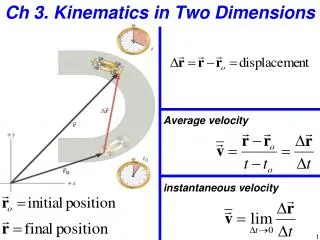
Two-Dimensional Displacement Sologdin the Turtle moves in the X-Y plane from the point (x0, y0) to the point (x1, y1). R1 and R2 are vectors from the origin to his starting and finishing point, respectively.
Two-Dimensional Displacement Sologdin’s displacement vector D is the vector that extends from the starting of his motion to its endpoint. In keeping with our Chapter 2 definition of displacement, we will define Sologdin’s displacement by
Two-Dimensional Displacement We can see the truth of this by solving for R1: Our picture shows this addition being done, graphically.
Two-Dimensional Displacement Since both R0 and R1 start at the origin, it is very easy to write down the magnitudes of their X and Y components:
Two-Dimensional Displacement Now we perform the subtraction by subtracting the component magnitudes: The magnitude of D:
Two-Dimensional Displacement The direction of D is more clearly seen if we translate D so that its starting point is at the origin. (Remember that vectors are not changed by translating them.) We can always write
Two-Dimensional Displacement We used the absolute value signs here because we want simply the lengths of the two legs of the right triangle. The sense of the angle is apparent from the drawing. We would describe the direction of D as “60° below the positive X axis,” or “60° clockwise from +X.”
Two-Dimensional Velocity Let’s return to the travels of Sologdin … and this time, we’ll use our stopwatch. Solgdin’s journey begins at time t0, and ends at a later time t1.
Two-Dimensional Velocity Sologdin’s average velocity is a vector. Its magnitude is the magnitude of his displacement, D, divided by the elapsed time: Its direction is the same as the direction of the displacement vector.
Two-Dimensional Velocity Sologdin’s average speed is not merely the magnitude of his average velocity. Let S be the curvilinear length of his meandering path. Then his average speed is Note that his average speed exceeds his average velocity.
Two-Dimensional Velocity The critical difference between speed and velocity: Consider the race car that wins the Indianapolis 500. It completes 200 laps at 2.5 miles each in 2.75 hours. Its average speed is 500 mi / 2.75 hr = 182 mi/hr. What is its average velocity?
Two-Dimensional Velocity What is its average velocity? Zero magnitude; pick a direction. Its displacement is zero (the race both starts and ends at the start-finish line). And zero divided by any amount of time yields a magnitude of zero for the average velocity.
Two-Dimensional Acceleration A truck travels east at 12 m/s. Following a bend in the road, the truck turns so that it is headed north, still at 12 m/s. The truck spends 8.0 s negotiating the curve. What is its average acceleration? From the definition of acceleration: Here, we have graphically added -v0 to v1.
Two-Dimensional Acceleration Having obtained v1- v0, we need to multiply that vector by the scalar 1/t to obtain a:
Two-Dimensional Acceleration The direction of a is the same as the direction of v1- v0. Since the magnitudes of v1 and v0 are equal, we can write So, the average acceleration is 2.1 m/s2, 45° west of north. Note that the speed did not change – only the direction.
Projectile Motion A projectile is something that is launched or thrown. In the general case, it has a nonzero horizontal component of initial velocity.
Projectile Motion In most cases, the projectile experiences a negative vertical acceleration (g, due to gravity). In most cases (assuming we can ignore resistance due to the air), the projectile experiences zero horizontal acceleration. Its horizontal velocity is constant. The general approach to all problems of this kind: apply the kinematic equations separately to the vertical and horizontal motion.
Projectile Motion: Example Illustrative example: the golfer in the picture has launched his ball with an initial velocity of 45 m/s, 31° above the horizontal. We will analyze the flight of the ball, in order to be able to say: • How far will the ball “carry” over level ground? • How high above the ground will the ball reach at its highest point? • What is the total time the ball will be in the air?
Projectile Motion: Example First step: resolve the ball’s initial velocity into horizontal and vertical components.
Projectile Motion: Example Keep firmly in mind that v0y is not going to remain constant … but that v0x will.
Projectile Motion: Example During the time the ball takes to rise vertically, stop vertically, and fall vertically back to the ground, the ball moves horizontally with constant velocity. We must determine just how long that time of flight is.
Projectile Motion: Example Vertically, the ball obeys the first kinematic equation: In our case, the initial vertical velocity is: The acceleration is downward: g, the acceleration due to gravity. If we define our coordinate system with +Y pointing up, we rewrite the first kinematic equation:
Projectile Motion: Example In terms of its vertical motion, the ball stops momentarily at the top of its trajectory. We also showed, in chapter 2, that its vertical travel is symmetric: it rises for half the time of flight, and falls for half the time. So, if t is the full time of flight, we can rewrite our kinematic equation for the upward travel by setting the final (y) velocity to zero:
Projectile Motion: Example Solving for t, the total time of flight:
Projectile Motion: Example The ball’s horizontal motion is governed by another kinematic equation: In the horizontal, however, the acceleration is zero, and the initial velocity is so we can rewrite our equation:
Projectile Motion: Example How high does the ball go at the top of its trajectory? Recall that we already calculated the total time of flight: t = 4.730 s. Recall also that the ball spent half that time falling (with zero initial vertical velocity) from its highest point. How far did it fall?
Projectile Motion: Example We can calculate this maximum height directly from the third kinematic equation: Notice that the initial y velocity (for the falling part of the trajectory) is zero, reducing the equation to: The time we used was half the time-of-flight, t.
Parametric Representation of a Trajectory So far, we have written both x and y as independent functions of time, t. We can combine these descriptions to express y as a function of x: the equation of the projectile’s trajectory. Suppose our object is launched from the origin: x = y = 0. Then:
Parametric Representation of a Trajectory Solve eq’n (1) for t: Substitute this result for t in eq’n. 2:
Projectile Motion: Things to Remember • Basic principle: the vertical motion and the horizontal motion are treated separately. • In the vertical motion, there is acceleration (usually, g). • In the horizontal motion, acceleration is zero and velocity is constant. • Resolve the initial velocity into horizontal and vertical components. • Apply the kinematic equations to each motion, separately. • If “g” appears in an equation with “x”, slap your own hand.
Relative Motion Consider an airplane flying through air, when the air is in motion relative to the ground (wind). The wind is blowing eastward. The pilot points his airplane straight north. In what direction does the airplane move over the ground? How fast does it go? (In other words, what is the airplane’s velocity over the ground … magnitude and direction?)
Relative Motion Principle of relative velocity: Suppose the airplane’s speed through the air is 55 m/s, and the air moves over the ground with a wind speed of 8.9 m/s.
Relative Motion Velocity of plane over ground Magnitude (speed): Direction: (9.2° east of north)