Download
1 / 39
390 likes | 408 Vues
Join the Robot Tour Trial and showcase your skills in building an autonomous line-following robot. This low-cost event will challenge participants to create robots that can navigate a track and follow lines without remote control. Get ready to compete and demonstrate your robot's design and programming prowess!

E N D
Robot TourTrial 2019Div C Brian Hoffman SO Event Coach State Event Supervisor Assist to National Event Supervisor Tech Committee Member
Agenda • Goals of Event • Event Description • Event Rules • Build • Track Area • Competition • Line Following Concept • Robot Design • Kit Recommendations
Goals for Robot Tour • Create a True Robot Event • Autonomous Operation • NOT Remote Controlled • Low Cost Robot Kits (<$50) are Competitive • Large Availability of Robot Kits • Higher Cost Kits do NOT have Major Advantage • Some Programming During Event Time • Competitors must make some programming changes after impound • Not Complex for Event Supervisor
Event Description • Line Following • Start & Target Points announced after Impound • Target Time • Between 30 and 60sec • Bonus Points based on Path Taken
AGV Auto Guided Vehicle This Event is Based on Current Real World Tech!!!
AGVs – Line Following??? • Industrial AGVs are Line Following • Wire Embedded in Floor • Advanced AGVs Learn Environment without Wire • Possible Future Years • Currently Beyond Event Cost Limits
Event Rules - Build • Autonomous robotic vehicle to follow track lines • Not Remote Controlled • Powered by up to 8 AA batteries • Must completely fit in a 30cm by 30cm space of any height • ¼” Dowel Round mounted to front for measurements
Event Rules - Track • Lines 1.9cm (3/4”) • Start Point (16) • Target Point (12) • Track Intersections • Decision Points • Bonus Gates • Bonus Awarded for Crossing Gate • 3 Regionals • 4 States • 6 National
Event Rules - Track • Printable PDFs Available to Simplify Track Creation
Event Rules - Competition • Impound Event • Robot and Spare Parts • Robot Program (USB Drive and Not Laptop) • Competitors MUST ONLY use Impounded Program • Event Time: 12 Minutes • Includes programming changes • Include all runs • Not included is Event Supervisor measurement time • Event Time Used is part of Final Score
Event Rules - Competition • Event Time ends at: • 2 Successful Runs OR • 3 Failed Runs OR • 12 Minute Time Limit Reached • Current Run allowed to Finish • Failed Run is • Run Time reaches twice the Target Time • Robot exits the Track Area • Competitors ask current run to be marked as a Failed Run
Event Rules - Competition • Run Time (Compared to Target Time) • Starts when robot begins to move • Ends when Robot Stops or is a Failed Run • Robot is stopped if does not move for 3 seconds; the 3 seconds is not included in run time • Not recorded for a Failed Run • Gate Bonus • Dowel MUST cross Gate Line first • Gates can be crossed in any order and direction • Each Gate may only be counted once
Robot Path is Not Defined • Competitors choose their best path
Scoring • Run Score = Time Score + Distance Score + Gate Bonus + Penalties • Final Score is highest Run Score in the lowest tier number • Team with the highest Final Score in the lowest tier number wins
Scoring – Time Score • Run Time < Target Time • Time Score = 90 – (Target Time – Run Time) x 2 • Run Time >= Target Time • Time Score = 90 – (Run Time – Target Time) • Penalty for being under Target Time
Scoring – Distance Score • Robot Distance • Point to Point Measurement from the Target Point to Robot’s Dowel • Front Edge of Dowel is Measurement Point • Measured to nearest 0.1cm • Distance Score = Robot Distance * -0.5
Scoring – Gate Bonus • Gate Bonus • 15 Points for Each Gate crossed in any order • A Gate may only be counted once
Scoring - Penalties • Event Time Penalty • -1 Points for every 10 seconds beyond 8 minutes • Rounded down to whole point • Max Penalty (4 Mins Over) is (240 sec / 10) -24 Points • Practice Log Penalty • -250 Points for Incomplete Log • -500 Points for Not Impounded Log • Tiers • Tier 1: Run with no violations. • Tier 2: Run with any competition violations. • Tier 3: Run with any construction violations. • Tier 4: Teams that did not impound their Robot during the impound period.
Scoring - Example Target Time = 43s. Robot Distance = 21.7 cm Run Time = 58.53 sec. Gates Crossed = “C” and “A” Recorded Event Time = 8 min & 35 sec Practice Log = Valid & Impounded
Building a Robot TIPS & SUGGESTIONS
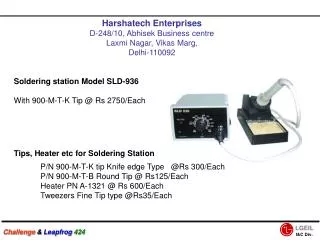
Building a Robot • Sensor to detect track line • Typically Infrared (IR) Sensors • Detect reflected IR wavelengths **Not colors • Recommend sensitivity adjustment (POT) • Sold as individual sensor or bank of sensors • Bright light or sun light can cause false trigger • Limited sensing range (6 to 12mm) • Track must be flat to avoid sensor issues • Range from $0.50 to $4.00 each
Line Following Concept • Robot has sensors to detect track lines • Program uses sensor status (On/Off) to steer robot IR Sensors Robot Turn Right Turn Left Straight
Example Robots with Sensors • Located on front of robot for steering • Recommend more than 2 sensors Sensors
Not Just Line Following • Decisions need to be made • Follow Path “A” or “B”??? Path B Path A Intersection Points Travel Direction
Make Decisions • Robot needs to detect Intersection Points • Recommend additional sensors to detect these points Path B Path A Intersection Points Line Sensors Intersection Sensors
Programming Tip • Most line following examples available do not include decision making logic • More information (sensors) is always better • Real world AGV follow the line’s edge and not the line An Edge in this example is the Left or Right side of the line
Building - Motion • 4 wheel vs 2 wheel??? • 2 Wheels = Less costs and easier steering • Moving fast is not as important • Slower robots are easier to steer • Most basic robot kits move fast!!
Building - Motors • Recommend DC motors with speed control • Most microcontrollers use PWM outputs • PWM is Pulse Width Modulation • The higher the PWM percentage then the faster the motor will rotate • Typically DC motors need 50% or higher to rotate ON OFF 25% 50% 75%
Building – Motor Gearing • Many DC motors w/o gearing rotate at 1000 to 8000 RPMs or higher • A Gearbox is required to reduce the speed to a useable level • Higher gear reductions given better speed and steering control but at a loss of overall movement speed • Motors shown range from $2 to $8 each 224:1 143:1 48:1 120:1 w/ Encoder
Robot - Brains • The robot needs to have its program modified during the event • Recommend using a micro controller that is easy and quick to modify • Determine: Does the school or competitors have access to a laptop for during the event? • If no, more expensive robots may be required • Common Micro processors / computers Arduino Teensy Raspberry Pi PIC Lego and many more….
Robot – Brains - Arduino • Arduino is an excellent option • Windows / Mac / Linux • Most robot basic kits include an Arduino • Add-on kits available for • Display screens • Line following modules • Modules for easier wiring • And more …. • Caution: A limited number of sensors and motors that can be connected • Next Slide shows Example • Several options exist to expand this number, but that is beyond this presentation
Ardunio UNO – Example Green Pin #s Red Pin #s Note: Diagrams are example wirings and should not be used. Consult purchased hardware’s instructions for actual wiring.
Programming Tip • Teams have just 12 minutes to program and run their robot. • 8 minutes or less is better • Program should be developed to execute a list of commands that are easily modified • Follow Line • Find Intersection • Follow Left Path • Find Intersection • Follow Line • Find Intersection • Follow Left Path • Find Intersection • Follow Right Path • Find Intersection • Follow Left Path • Find Intersection • Stop
Robot Ideas • The following robots are examples only. • No promises on performance. Use at your own risk. • Modifications should be made to improve performance and costs.
Robot #1Approximate Cost $65 ($52) • Excellent low cost starting point. • Difficult to control at low speeds OSOYOO 2WD Robot Car Kit $35.99 6 AA Battery Holder (2) $7.39 3D Printed PE & Dowel Mount $0.50 TCRT5000 IR Line Sensor (6) $8.98 Optional Can slow reaction time SunFounder I2C 20x4 Display $12.99
Robot #2Approximate Cost $60 ELEGOO UNO Project Smart Robot Car Kit $54.99 The 4WD had issues following the curves
Robot #3Approximate Cost $135 Very good but expensive DPDT Mini Power Switch $2.70 6 AA Battery Holder (2) $7.39 SunFounder I2C Line Follower $12.99 RobotDyn Mega Prototype Shield $8.20 Elecrow Dual H-Bridge DC Motor Controller $17.80 3D Printed PE & Dowel Mount $0.35 12V, 58RPM 60:1 Gear Motor w/ Encoder (2) $18.50/ea SunFounder I2C 20x4 Display $12.99 3D Printed Motor Mount (4) $0.25/ea Lynxmotion HUB-02 Universal Hub - 6mm (pair) $7.65 SunFounder Arduino Mega $13.99 Caster Wheel 25mm Diameter $4.90 3D Printed Base $1.50 3D Printed Wheel (2) $0.10/ea 12 SPST Pushbuttons $7.99
Robot #4Approximate Cost $65 Very good speed control for a low cost robot Upgrades to Robot #1 OSOYOO 2WD Robot Car Kit $35.99 6 AA Battery Holder (2) $7.39 GM9 Gear Motor 200:1 (2) $5.75/ea 3D Printed Wheel (2) $0.10/ea 3D Printed PE & Dowel Mount $0.50 TCRT5000 IR Line Sensor (6) $8.98
Questions??? ???