
Schematic Models of Voigt and Kelvin for Ground Reaction Forces in Prosthetic Studies
This figure presents schematic illustrations of the Voigt and Kelvin lumped parameter models. The adapted Voigt model, used in studies by Klute et al., describes the foot-ground reaction force (Fg) as a function of displacement (x) using the equation Fg = a * x^b + sign(x) * c * |x|^d * e. Key parameters include stiffness (a), damping (c), and a position-dependent factor in the damping element. The model can represent linear spring and damper systems by adjusting the exponents, providing critical insights into the mechanics of transtibial prostheses.

Schematic Models of Voigt and Kelvin for Ground Reaction Forces in Prosthetic Studies
E N D
Presentation Transcript
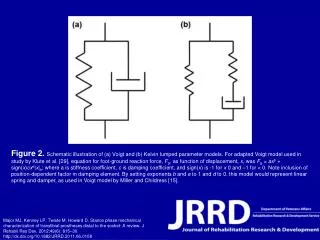
Figure 2. Schematic illustration of (a) Voigt and (b) Kelvin lumped parameter models. For adapted Voigt model used in study by Klute et al. [29], equation for foot-ground reaction force, Fg, as function of displacement, x, was Fg = axb + sign(x)cxd|x|e; where a is stiffness coefficient, c is damping coefficient, and sign(x) is -1 for x 0 and –1 for < 0. Note inclusion of position-dependent factor in damping element. By setting exponents b and e to 1 and d to 0, this model would represent linear spring and damper, as used in Voigt model by Miller and Childress [15]. Major MJ, Kenney LP, Twiste M, Howard D. Stance phase mechanical characterization of transtibial prostheses distal to the socket: A review. J Rehabil Res Dev. 2012;49(6): 815–30.http://dx.doi.org/10.1682/JRRD.2011.06.0108