Rotational Motion
Angular Displacement, Velocity, and Acceleration Rotational Energy Moment of Inertia Torque Work, Power and Energy in Rotational Motion. Rotational Motion. In rotational motion , position is represented by an angle, such as q , and a radius, r. x = 3. p /2. r. q. p. 0. angular.

Rotational Motion
E N D
Presentation Transcript
Angular Displacement, Velocity, and Acceleration Rotational Energy Moment of Inertia Torque Work, Power and Energy in Rotational Motion Rotational Motion
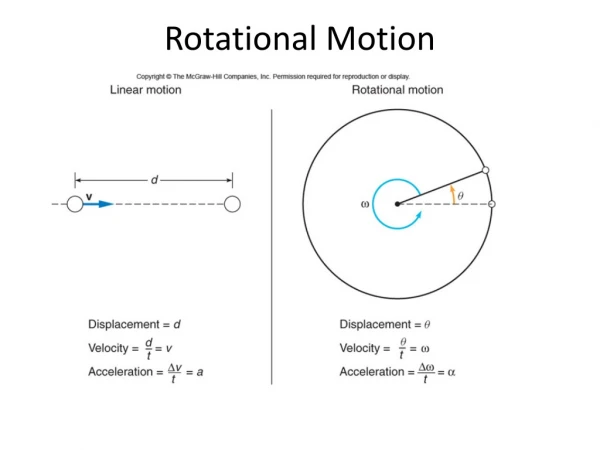
In rotational motion, position is represented by an angle, such as q, and a radius, r x = 3 p/2 r q p 0 angular 3p/2 position • In translational motion, position is represented by a point, such as x x 0 5 linear
Angular displacement is represented by Dq, which is not a vector, but behaves like one for small values. The right hand rule determines direction Dx = - 4 p/2 Dq p 0 angular 3p/2 displacement • Linear displacement is represented by the vector Dx x 0 5 linear
This distance s is related to the angular displacement Dqby the equation s = rDq s Dq Tangential and angular displacement • A particle that rotates through an angle Dq also translates through a distance s, which is the arc length of its path r
The instantaneous velocity has magnitude vT = ds/dtand is tangent to the circle The same particle rotates with an angular velocityw = dq/dt The direction of the angular velocity is given by the right hand rule Tangential and angular speeds are related by the equation v = rw vT s Dq vT Speed and velocity r w is outward according to RHR
Tangential acceleration is given by aT = dvT/dtand is in the same direction as the tangential velocity Angular acceleration of this particle is given by a = dw/dtand is in the same direction as the angular velocity Tangential and angular accelerations are related by the equation a = ra s Dq acceleration vT r Dq vT w is outward according to RHR
First Kinematic Equation • v = vo + at (linear form) • Substitute angular velocity for velocity • Substitute angular acceleration for acceleration • = o + t(angular form)
Second Kinematic Equation • x = xo + vot + ½ at2(linear form) • Substitute angle for position • Substitute angular velocity for velocity • Substitute angular acceleration for acceleration • q = qo + ot + ½ t2(angular form)
Third Kinematic Equation • v2 = vo2 + 2a(x - xo) (linear form) • Substitute angle for position • Substitute angular velocity for velocity • Substitute angular acceleration for acceleration • 2 = o2 + 2(q - qo) (angular form)
Practice Problem: A turntable rotates with a constant angular acceleration of 5.60 rad/s2 and the angular speed of the turntable is 3.00 rad/s at t = 0. • Through what angle does the wheel rotate in 4.00 seconds? • What is the angular speed at t = 4.00 s? 56.8 rad or 3254° 25.6 rad/s
Practice problem: The angular velocity of a flywheel is described by the equation w = (8.00 – 2.00 t2). Determine the angular displacement when the flywheel reverses its direction. (changes direction @ t = 2s) 10.67 rad or 611°
Rotational energy • Bodies moving in a straight line have translational kinetic energy • KE= ½mv2 • Although every particle has the same angular speed ω, the individual linear speeds depend on their distance from the axis of rotation (v = rω) • The TOTAL Kinetic Energy of a rotating object comes from adding the Kinetic Energies of each individual particle: • KER= ΣKE = Σ½mv2 = ½Σmr2ω2
Rotational Energy and Moment of inertia • KER = ½Σmr2ω2 = ½ (Σmr2) ω2 • The ½ and ω are common to every term • The quantity (Σmr2) is called the Moment of Inertia • I = Σmr2 • The moment of Inertia has dimensions of ML2 (kgm2) • We can then describe the Rotational Kinetic Energy of an object as: • KER = ½Iω2 • This is not a new type of energy, and it is possible to have both forms at once • Ktot = ½ m v2 + ½ I 2
Moment of inertia • Moment of inertia, also referred to as the rotational inertia or the angular mass, is a measure of an object’s resistance to a change in it’s rotation rate • The role of moment of inertia in rotational dynamics is analogous to mass in linear dynamics (which is a measure of an object’s resistance to a change in motion)
Moment of inertia • I = mr2(for a system of particles) • I = limmr2 • I = dm r2(for a solid object) • dm = λdL • dm = σdA • dm = ρdV
Practice Problem: A 3.0 m long lightweight rod has a 1.0 kg mass attached to one end, and a 1.5 kg mass attached to the other. If the rod is spinning at 20 rpm about its midpoint around an axis that is perpendicular to the rod, what is the resulting rotational kinetic energy? Ignore the mass of the rod. KErot=12.3 J
Practice Problem: Calculate the Moment of Inertia of a uniform hoop of mass M and radius R.
Practice Problem: Calculate the Moment of Inertia of a uniform rod of mass M and length L rotating around it’s center of mass I=1/12 ML2
Practice Problem: Calculate the Moment of Inertia of a uniform rod of mass M and length L rotating around it’s center of mass I=1/3 ML2
Parallel axis theorem • If you know the moment of Inertia about the center of mass of an object, you can find the moment of inertia about any other axis parallel to the original one. I = Icm + MD2
Parallel axis theorem: Example • Find the moment of inertia of a uniform rigid rod of mass M and length L about an axis perpendicular to the rod through one end • Icm= The moment of inertia around the center of mass of an object • D = the distance from the COM of an object to the new axis of rotation I = Icm + MD2
Parallel axis theorem: Example • Find the moment of inertia of a uniform rigid rod of mass M and length L about an axis perpendicular to the rod through one end • Recall That: I = Icm + MD2 I = 1/12ML2 M(L/2)2 = 1/3 ML2
EQUILIBRIUM • Equilibrium occurs when there is no net force and no net torque on a system • Static equilibriumoccurs when nothing in the system is moving or rotating in your reference frame • Dynamic equilibrium occurs when the system is translating at constant velocity and/or rotating at constant rotational velocity • Conditions for equilibrium: • St = 0 • SF = 0
Hinge (rotates) r Direction of rotation F Torque Torque is the rotational analog of force that causes rotation to begin. Consider a force F on the beam that is applied a distance rfrom the hinge on a beam. (Define r as a vector having its tail on the hinge and its head at the point of application of the force.) Arotation occurs due to the combination of r and F. In this case, the direction is clockwise. Use the right hand rule to find the direction of Torque Direction of torque is INTO THE SCREEN.
Calculating Torque • The magnitude of the torque is proportional to that of the force and moment arm, and torque is at right angles to the plane established by the force and moment arm vectors. (aka a Cross Product) • = rF = Frsinθ • : torque • r: moment arm (from point of rotation to point of application of force) • F: force
Practice Problem F What must F be to achieve equilibrium? Assume there is no friction on the pulley axle. F = 45.73 N (clockwise) 3 cm 2 cm 2 kg 10 kg
Torque and Newton’s 2nd Law • Rewrite SF = ma for rotating systems • Substitute torque for force • Substitute rotational inertia for mass • Substitute angular acceleration for acceleration • S = I • : torque • I: rotational inertia • : angular acceleration
Torque and Newton’s 2nd Law • Rewrite SF = ma for rotating systems • = Fr = (ma)r • Remember that a = αr • = Fr = (ma)r = m(αr)r = (mr2) α • = I
Practice Problem A 1.0-kg wheel of 25-cm radius is at rest on a fixed axis. A force of 0.45 N is applied tangent to the rim of the wheel for 5 seconds. • What is the angular acceleration of the wheel? • After this time, what is the angular velocity of the wheel? • Through what angle does the wheel rotate during this 5 second period? 1.8 rad/s2 9 rad/s 45 rad or 2578°
Practice problem Calculate Tension, acceleration, and angular acceleration in terms of I and R. Assume the pulley has a radius R and moment of inertia I. m1
Work in rotating systems • W = F • Dr (translational systems) • Substitute torque for force • Substitute angular displacement for displacement • Wrot= t • Dq • Wrot : work done in rotation • : torque • Dq: angular displacement • Remember that different kinds of work change different kinds of energy: • Wnet = DK Wc = -DU Wnc = DE
Power in rotating systems • P = dW/dt (in translating or rotating systems) • P = F • v (translating systems) • Substitute torque for force • Substitute angular velocity for velocity • Prot = t • w(rotating systems) • Prot : power expended • : torque • w: angular velocity
Conservation of Energy • Etot = U + K = Constant • (rotating or linear system) • For gravitational systems, use the center of mass of the object for calculating U • Use rotational and/or translational kinetic energy where necessary
Practice problem A rod with mass M and length L is free to rotate around the pivot point at one end of the rod. The rod is held at the horizontal position and let go starting from rest. Calculate the angular velocity of the rod when the rod is at it’s lowest position b) Calculate the linear velocity of the center of mass of the rod at it’s lowest position c) Calculate the linear velocity of the end of the rod at it’s lowest position ω=(3g/L)1/2 V = ½ (3gl)1/2 V = (3gl)1/2
Practice Problem A rotating flywheel provides power to amachine. The flywheel is originally rotating at of 2,500 rpm. The flywheel is a solid cylinder of mass 1,250 kg and diameter of 0.75 m. If the machine requires an average power of 12 kW, for how long can the flywheel provide power? (I=1/2MR2 for a cylinder) Δt = 251 seconds