Comparing Nonlinear Dimension Reduction: Semi-Definite Embedding vs. Local Linear Embedding
This paper analyzes two prominent nonlinear dimension reduction techniques: Semi-Definite Embedding (SDE) and Local Linear Embedding (LLE). Nonlinear dimension reduction aims to map high-dimensional data to lower dimensions while preserving essential characteristics. The study highlights the methodologies, including neighborhood finding, semi-definite programming for SDE, and performance comparisons on various datasets such as Swiss Roll and Faces. It concludes that while SDE offers better quality and robustness to sparse samples, LLE is faster and more scalable for larger datasets, albeit with lower quality under sparse conditions.

Comparing Nonlinear Dimension Reduction: Semi-Definite Embedding vs. Local Linear Embedding
E N D
Presentation Transcript
Nonlinear Dimension Reduction: Semi-Definite Embedding vs. Local Linear Embedding Li Zhang and Lin Liao
Outline • Nonlinear Dimension Reduction • Semi-Definite Embedding • Local Linear Embedding • Experiments
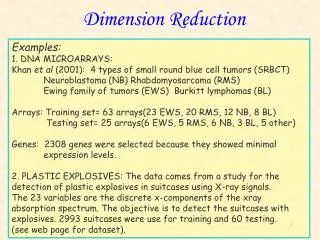
Dimension Reduction • To understand images in terms of their basic modes of variability. • Unsupervised learning problem: Given N high dimensional input Xi RD, find a faithful one-to-one mapping to N low dimensional output Yi Rd and d<D. • Methods: • Linear methods (PCA, MDS): subspace • Nonlinear methods (SDE, LLE): manifold
Semi-Definite Embedding Given input X=(X1,...,XN) and k • Finding the k nearest neighbors for each input Xi • Formulate and solve a corresponding semi-definite programming problem; find optimal Gram matrix of output K=YTY • Extract approximately a low dimensional embedding Y from the eigenvectors and eigenvalues of Gram matrix K
Semi-Definite Programming Maximize C·X Subject to AX=b matrix(X) is positive semi-definite where X is a vector with size n2, and matrix(X) is a n by n matrix reshaped from X
Semi-Definite Programming • Constraints: • Maintain the distance between neighbors |Xi-Xj|2=|Yi-Yj|2 for each pair of neighbor (i,j) Kii+Kjj-Kij-Kji= Gii+Gjj-Gij-Gji where K=YTY,G=XTX • Constrain the output centered on the origin ΣYi=0 ΣKij=0 • K is positive semidefinite
Semi-Definite Programming • Objective function • Maximize the sum of pairwise squared distance between outputs Σij|Yi-Yj|2 Tr(K)
Semi-Definite Programming • Solve the best K using any SDP solver • CSDP (fast, stable) • SeDuMi (stable, slow) • SDPT3 (new, fastest, not well tested)
Swiss Roll SDE, k=4 LLE, k=18 N=800
LLE on Swiss Roll, varying K K=5 K=6 K=8 K=10
LLE on Swiss Roll, varying K K=12 K=14 K=16 K=18
LLE on Swiss Roll, varying K K=20 K=30 K=40 K=60
Twos SDE, k=4 LLE, k=18 N=638
Teapots SDE, k=4 LLE, k=12 N=400
LLE on Teapot, varying N N=400 K=200 K=100 K=50
Faces SDE, failed LLE, k=12 N=1900
SDE versus LLE • Similar idea • First, compute neighborhoods in the input space • Second, construct a square matrix to characterize local relationship between input data. • Finally, compute low-dimension embedding using the eigenvectors of the matrix
SDE versus LLE • Different performance • SDE: good quality, more robust to sparse samples, but optimization is slow and hard to scale to large data set • LLE: fast, scalable to large data set, but low quality when samples are sparse, due to locally linear assumption