Slotted Nonpersistent CSMA
Slotted Non-Persistent Carrier Sense Multiple Access (CSMA) utilizes time slots for effective transmission in network channels. By dividing the timeline into mini-slots, users can sense channel status and attempt transmission when idle. If the channel is busy, packets are rescheduled randomly. This method aims to optimize throughput through careful collision resolution strategies, ensuring that nodes manage their transmissions efficiently. The analysis incorporates idle and busy periods while considering success probabilities, offering insights for improved network performance, even in noisy environments.

Slotted Nonpersistent CSMA
E N D
Presentation Transcript
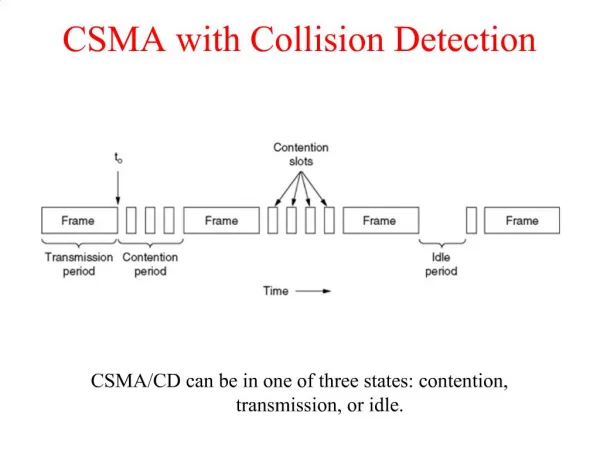
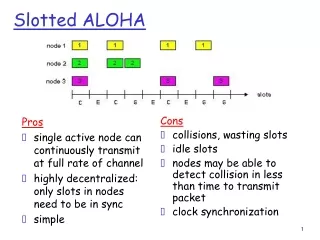
Slotted Nonpersistent CSMA • Timeline divided into time slots, called mini slot, with length equal to maximum propagation delay t. • Before attempting transmission, the user waits for the beginning of the next slot, and senses whether the channel is idle. If idle, he sends the packet for T time slots. • If the channel is busy, the packet is rescheduled to some randomly chosen time in the future.
Throughput analysis • Idle period = 1 => arrival in first idle slot • Idle period = 2 => no arrival in first and arrival in second …
Idle period • Following the above reasoning we get: • Giving us:
Busy Period • Both successful and unsuccessful transmissions last T+t • A busy period will contain k transmission periods if there is at least one arrival in the last mini-slot of each of the first k-1 transmission periods, and no arrival in the last mini-slot of the kth transmission period: • And:
Useful time • During the busy period, the number of transmission periods is: • When a transmission period is useful it carries information for T seconds • The useful part of the busy-idle cycle is then: Where Psuc denotes the success probability
Success probability • We divide by the probability of “some arrivals” because we know there was at least one arrival, since a transmission period has been initiated
BTP collision resolution • Given a MA channel with Trenary Feedback running BTP for collision resolution. • A node perform the following algorithm upon waking up: • If collision, wait for resolution and then transmit • Otherwise (if quiet or success), broadcast in the next time slot. • At time t, n nodes collided. At time T>t a new node woke up wishing to send a packet. Which of the following is true? • The node will transmit successfully only after all n nodes have successfully transmitted • The node will transmit during the collision resolution, and the result will be as if the node had collided with the n nodes in the first place • Either 1. or 2. depending on the place in the of the slot in the virtual tree • Either 1. or 2. according to the type of slot the node sensed • All the above answers are wrong
BTP in a noisy channel • Consider a MA channel where BTP is applied and noise is present. The impact of noise is that there is a probability p1 that a slot which contains a single transmission is interpreted as a collision. • How will the CRIs (Collision Resolution Intervals) change?
נפתור • How will the optimal probability p change: