Lego Mindstorm
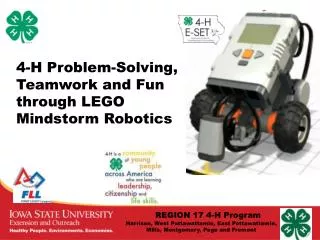
Lego Mindstorm. De quoi est composé ton robot ?. Son “ cerveau ” sur lequel seront reliés les capteurs et les moteurs . Dans cette brique , nous téléchargerons les programmes faits sur le PC. . 3 moteurs : le A active la pince le B et C font tourner les roues.


Lego Mindstorm
E N D
Presentation Transcript
De quoi estcomposé ton robot ? • Son “cerveau” surlequelserontreliés les capteurs et les moteurs.Danscettebrique, nous téléchargerons les programmesfaitssur le PC. • 3 moteurs : • le A active la pince • le B et C font tourner les roues • 1 pince pour attraperdes objets. Ici, ce sera uneballe. • Différentscapteurs.
Capteursmontéssurle robot • Avec cecapteur de contact sensible à la pression (sorted’interrupteur), ton robot vadécouvrir la sensation du “toucher” ! • Le “capteurde lumière” réagitselonl’intensité de la lumière (lumière présenteou absente). • Le “capteurultrasonique” réagitàla présenceouàl'absence d'un objet. • Le “capteurde bruit” réagit au bruit (quand on claque des mains, par exemple).
Comment programmer le Lego Mindstorm ? • Les programmessont sous forme de briquesgraphiquesquel'onvaajouter les unes aux autres. • On peut : • faire avancerle robot • le faire attendre • le faire parler, • attraperun objet, etc ...
Mission 1 : faire bouger le robot ! • Créerun nouveau programme: • Ajouter un bloc “Déplacer” et le paramétrer: • Ajouter un bloc “Hello” et le paramétrer :
Mission 1 (la suite) : faire bouger le robot ! • Ajouterun bloc “Déplacer” et le paramétrer : • Connecterle robot au PC et l'allumer: • Charger le programmedans le robot : • Déconnecter le robot du PC, le placer sur la zone de test et lancer le programme
Mission 2 : Attraperla balle ! But de la mission : le robot roulejusqu'à la balle, attend uneseconde, attrape la balle et fait marchearrière. • Créer un nouveau programme: • Ajouter un bloc “Déplacer” et le paramétrer :
Mission 2 (la suite) : Attraper la balle ! • Ajouter un bloc “Attented'un choc“ et le paramétrer: • Ajouter un bloc “s'arrêter” et le paramétrer :
Mission 2 (la suite) : Attraper la balle ! • Ajouter un bloc “Attente” et le paramétrer: • Ajouter un bloc “fermerla pince” et le paramétrer : La fermeturede la pinceestprovoquée par la rotation inversée du moteur pendant une demi-seconde. La puissance maximaleestrequise pour faire cette action dans les plus brefsdélais.
Mission 2 (la suite) : Attraper la balle ! • Ajouter un bloc « Déplacer » et le paramétrer : 2,3 rotations permettent au robot de revenir à sa position de départ. N'oublies pas de sauvegarder ton programme sur le PC !
Mission 3 : attraper la balle et faire demi-tour ! But de la mission : le robot roulejusqu'à la balle, attend uneseconde, attrape la ballequandtu claques des mains, fait un demi-tour, s'arrêteà la ligne noire et relâche la balle. Le début de la mission estidentiqueà la précédente. • Ajouterun bloc “capteurde bruit”et le paramétrer:
Mission 3 (la suite) : attraper la balle et faire demi-tour ! • Ajouter un bloc “fermerla pince”et un bloc “Déplacer”versl'arrière de 0,5 rotation. • Faire un demi-tour au robot. Il vafalloiractiver le moteur Cpuis le moteur B. • Ajouter un bloc “Déplacer”versl'avantd'une distance illimitée.
Mission 3 (la suite) : attraper la balle et faire demi-tour ! • Ajouter un bloc “Attendre”en utilisant le capteur de lumière. • Ajouter un bloc “Stop”, puis un bloc “Ouverturede la pince”. Le servomoteur Adoitêtreactionné pendant une demi-seconde. La puissance pour cetteopérationn'a pas besoin d'être importante => 30%.
Mission 4 : Détecterla présence de la balle, l'attraper et faire demi-tour ! But de la mission : le robot détecte la balle grâce à son capteurd'ultrason, roulejusqu'à la balle, attend uneseconde, attrape la ballequandtu claques des mains, fait un demi-tour, s'arrêteà la ligne noire et relâche la balle. Cette mission esttrèssimilaireà la précédente. Seulle début change car nous allonsutiliserle capteurd'ultrason : Le capteurultrasoniqueestconfigurerafin de détecterdes objetsàune distance de 50 cm.Dèsqu’unobjet estdétecté, le robot avance.