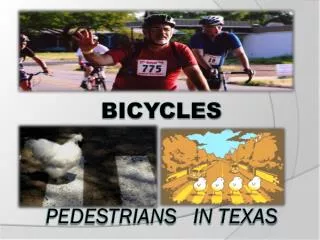
Detecting Pedestrians by Learning Shapelet Features
Detecting Pedestrians by Learning Shapelet Features. Payam Sabzmeydani and Greg Mori Vision and Media Lab School of Computing Science Simon Fraser University. Problem. Given a still image, we want to find and locate the pedestrians in the image Clothing (color, appearance) Body pose

Detecting Pedestrians by Learning Shapelet Features
E N D
Presentation Transcript
Detecting Pedestrians by Learning Shapelet Features Payam Sabzmeydani and Greg Mori Vision and Media Lab School of Computing Science Simon Fraser University
Problem • Given a still image, we want to find and locate the pedestrians in the image • Clothing (color, appearance) • Body pose • Applications: • Automated surveillance systems • Image search and retrieval • Robotics • Intelligent vehicles
Problem • Classification-based detection • Classify a window as pedestrian or non-pedestrian • Search exhaustively the scale-space image • Different cues • Wavelet coefficients (Mohan et al., PAMI 2001) • Oriented gradients (Dalal and Triggs, CVPR 2005) • SIFT features (Leibe et al., CVPR 2005) • Edgelet features (Wu and Nevatia, ICCV 2005) • “Shapelet features” (Sabzmeydani and Mori, CVPR 2007)
Datasets • MIT : Standing pose, simple background, no occlusion • INRIA : Standing pose, complex background, partial occlusions
Previous Work • Dalal & Triggs (CVPR 2005) • HOG features + SVM
Previous Work • Wu & Nevatia (ICCV 2005) • Edgelet features: short line and curve segments • AdaBoost
Our Method • Compute low-level gradient features • Oriented filter responses • Learn mid-level features for detecting pedestrians • “Shapelet features” • Build final classifier from shapelet features
Low-level Features • Filter responses • Image gradient in different directions
Low-level Features • Smoothed gradient responses in different directions
Shapelet Features • A weighted set of low-level gradient features inside a sub-window of the detection window • Characteristics • Simple and low-dimensional • Learned exclusively for our object classes • Highly discriminative • Local effective area : useful to model separate parts instead of the whole body
Learning Shapelet Features • Learned using AdaBoost (Viola and Jones, 2001) • Extract low-level features in sub-window • Select subset of features using AdaBoost • Find those which discriminate between pedestrian and background classes
Low-level features as weak classifiers • Each low-level feature can provide us many weak classifiers: • AdaBoost will combine weak classifiers to form a better classifier:
Shapelet features • Train classifiers in sub-windows • Use the output of a classifier as the shapelet feature response:
Final Classifier • Take all shapelet features • Learned at many sub-windows of detection window • Run AdaBoost again to select weighted subset of shapelet features for final classifier
Shapelet Feature Size • Small, Medium, and Large features • Capture different scales of information
Normalization • Why normalize? • Different lighting, shadows, different contrast, … • How to normalize? • Per shapelet feature : L2-norm
Error examples • Most non-pedestrian-like pedestrians (false negatives) • Most pedestrian-like non-pedestrians (false positives)
Future work • Detecting other objects • Use image context or segmentation • Pyramid of features
References • N. Dalal and B. Triggs. “Histograms of oriented gradients for human detection”. CVPR 2005. • B. Wu and R. Nevatia. “Detection of multiple, partially occluded humans in a single image by bayesian combination of edgelet part detectors”. ICCV 2005. • P. Viola and M. Jones. “Rapid object detection using a boosted cascade of simple features”. SCTV 2001.