Download
1 / 4
40 likes | 151 Vues
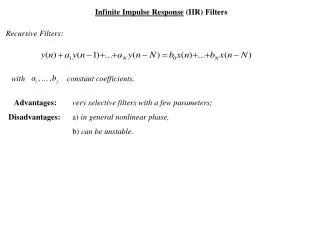
This project, developed by Nitin Jalan for Dr. V. Kepuska, focuses on the implementation of both FIR (Finite Impulse Response) and IIR (Infinite Impulse Response) filters with on/off functionality in microcomputer systems. The provided code outlines the algorithms for low-pass and high-pass IIR filters, utilizing bit manipulation and delays in their calculations. Key operations include shifting bits and circular buffering to ensure efficient processing of audio signals. This work demonstrates practical applications of digital filter design in embedded systems.

E N D
FIR and IIR Filters with on and off Functionality By: Nitin Jalan For: Dr. V. Kepuska Subject: Microcomputer System 1
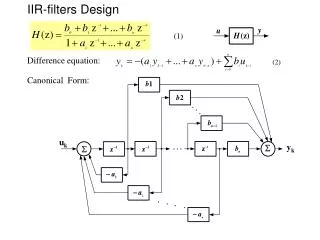
IIR Filter: High And Low Pass • //Low pass filter IIR function • void lowpassfilter_IIR(void) • { • float x = (float)(iChannel0LeftIn<<8); //shifts bits of the float x 8 bits to the left • int s; • for(s = 0; s <= 2; s++) //increments s from 0 to 2 • { • lpd0[s] = x - (lpA1[s]*lpd1[s]) - (lpA2[s]*lpd2[s]); //delay equation • x = (lpB2[s] * lpd2[s]) + (lpB1[s] * lpd1[s]) + (lpB0[s] * lpd0[s]); //output equation • lpd2[s] = lpd1[s]; //shifts the delays each sampling • lpd1[s] = lpd0[s]; • } • iChannel0LeftOut = ((int)x) >> 8; //shifts the output back 8 bits to the right • }
FIR FIltters: High Pass and Low PAss • void highpassfilter_FIR(void) • { • x[n] = (fract16) (iChannel0RightIn>>8); //shifts the x[n] 8 bits to the right • if (variables<1024) • { • buffer[variables++]= x[n]; //Buffer • } • output = 0; //sets the output to 0 • for(p=0; p<101; p++) • { • output = add_fr1x16(output, mult_fr1x16(x[(n-p+101) %101],yhp[p])); //filter delay equation including circular buffer • //uses fract16 funcions • } • n++; //increment pointer • n = n % 101; //keeps the pointer positive • iChannel0RightOut=((int)(output))<<8; //Output is shifted back 8 bits to the left • }
References • my.fit.edu/~vkepuska/ece3551 • Christian Stumf and Ryan Boleman Lab