Learning and Remapping in the Sensory Motor System
430 likes | 653 Vues
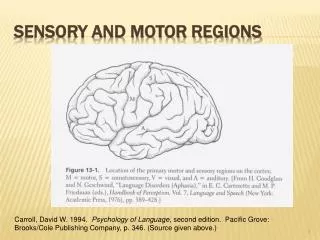
Learning and Remapping in the Sensory Motor System. F.A. Mussa-Ivaldi Northwestern University. In natural arm movements, complex motions of the joints lead to simple hand kinematics. From Morasso 1981. Is the shape of trajectories the byproduct of dynamic optimization?.

Learning and Remapping in the Sensory Motor System
E N D
Presentation Transcript
Learning and Remapping in the Sensory Motor System F.A. Mussa-Ivaldi Northwestern University
In natural arm movements, complex motions of the joints lead to simple hand kinematics From Morasso 1981
Is the shape of trajectories the byproduct of dynamic optimization? (Uno, Kawato and Suzuky, 1989)
Flanagan and Rao (1995) Kinematic Adaptation
Dynamic Adaptation Unperturbed movements Shadmehr & Mussa-Ivaldi, 1994
Note: there is no force at rest Perturbing field
After-effects Adaptation
Dingwell, Mah and Mussa-Ivaldi (2004) Transport of a spring-mass object
Baseline Initial response Post-adaptation kinematics
The shape of trajectories is not a by-product of dynamic optimization. It reflects and is consistent with the Euclidean properties of ordinary space
What is space ? • Intuitive Concept Geometry, from a physical standpoint is the totality of the laws according to which rigid bodies mutually at rest can be placed with respect to each other… “Space” in this interpretation is in principle an infinite rigid body – or skeleton - to which the position of all other bodies is related.” A. Einstein, 1949 • Less Intuitive Concepts Signals spaces, configuration spaces, state spaces, feature spaces, etc...
d y x Ordinary Space Two equivalent statements • Euclid • Pythagoras
Euclidean (L2) Norm Orthogonal transformation Euclidean Symmetry Among all possible norm only the L2 (Euclidean) norm is invariant under rigid transformations (e.g. rotations, translations). Size does not depend upon position and orientation.
Signal spaces • Neither the visual nor the motor signals spaces are Euclidean. • Yet, we perceive Euclidean symmetry and we coordinate motor commands to control independently movement amplitude and direction
It is a common misconception that the visual system provides the primal information about this symmetry. • In fact it is likely for the opposite to be true: we learn the properties of space through active perception
Is the bias toward Euclidean symmetry a guiding principle for the emergence of new motor programs?
The motor system can reassign degrees of freedom to novel tasks Glove Talk. Sidney Fels and Geoffrey Hinton, 1990 Vocabulary Sam-I-am
The properties of space are captured by the motor system when forming novel motor programs whose purpose is to control the motion of an endpoint
Remapping Space 19 SIGNALS (Hand Configuration) 2 Screen Coordinates F.A. Mussa-Ivaldi, S. Acosta, R. Scheidt, K.M. Mosier
The task • The subject must place the cursor corresponding to the hand inside a circular target • Experiment begins with the cursor inside a target. • New target is presented – Cursor is suppressed. • The subject must try to make a single rapid movement of the fingers so as to place the (invisible) cursor inside the new target and stop. • As the hand is at rest after this initial movement, the cursor reappears • The subject corrects by moving the cursor under visual guidance inside the target • Only the initial open loop movement is analyzed
Some examples Part 2 Part 1 A B D C
Some observations • Weird task. Cannot be represented before the experiment • Body and task endpoint are physically uncoupled • Only feedback pathway is vision • Dimensional imbalance • Metric imbalance
Single Subject Ensemble Endpoint error
Aspect-Ratio: AB/SE E Ensemble Single Subject B A S Linearity • Cursor movements DO NOT become straighter !
Extended training • 4 consecutive days • 2 groups of subjects • No-Vision subjects (P2) just engage in the task for 4 days • Vision subjects (P3) train with continuous visual feedback trials. But they are tested in the same no-vision condition as the other group. • The two groups receive the same amount of training
Extended Training Results • Both group have the same learning trend. • Continuous visual feedback of endpoint movements facilitates the formation of straighter open-loop trajectories
Error reduction and straightening of motion are independent processes • Straightening of motion is facilitated when vision and movement execution are concurrent
The subjects learn to solve an ill-posed inverse problem (from cursor location to hand gesture) and in doing so, they learn the geometrical structure of the map, i.e. a specific partition of degrees of freedom.
Task-space and Null-space Motion ↓19% ↓24% ↓20% ↓23%
Importing a metric structure
Practical Applications:Body-Machine Interfaces (BMI) Interface • Identify Residual Control Signals (Movements, EEG, EMG, Multiunit…) • Form a first “vocabulary” of commands (faster, slower, right, left, MIDI, etc…) • Machine learns to respond appropriately • Patient practice and leans new commands DUAL LEARNING
Sensing garments (Smartex -Pisa) • 52 smeared sensors on lycra • No metallic wires • External connection realized by metallic press stud
Calibration: Find optimally controlled DOFs (synergies) by dimensionality reduction
Natural Synergies -> Control Parameters A better map A bad map
The interaction of human and machine learning: Co-Adaptation by Least Mean Squares
The interactive LMS procedure - 1 1)Set an arbitrary starting map: Endpoint vector dim(x) =2 “Body” vector dim(h)=20
The interactive LMS procedure - 2 2) Collect movements toward a set of K targets: Targets Movements (endpoint coordinates) Movements (body coordinates)
The interactive LMS procedure - 3 3) Calculate the error (in endpoint coordinates) For each movement For a whole test epoch
The interactive LMS procedure - 4 4) Calculate the gradient of the error (w.r.t. A) 5) Update the A-matrix in the direction of the gradient 4) Repeat from step 2 until convergence.
Conclusion Sensory-Motor Cognition IS NOT an oxymoron !