Download
1 / 4
40 likes | 158 Vues
This exploration of Asynchronous Message Service (AMS) delves into its significance in deep space communication between spacecraft. It emphasizes event-driven and asynchronous message exchange, vital for streaming housekeeping data, real-time commanding, and collaborative robotic operations. The NASA proposed Command, Control, Communications, and Information (C3I) architecture relies on this model, facing challenges like heterogeneity and changing topologies. The CCSDS AMS standard, based on proven NASA technology, aims to provide a scalable, fault-tolerant, and platform-neutral communication solution for deep space missions.

E N D
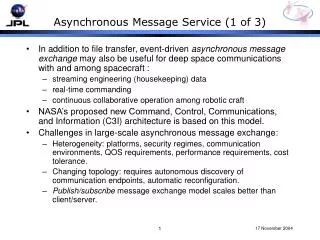
Asynchronous Message Service (1 of 3) • In addition to file transfer, event-driven asynchronous message exchange may also be useful for deep space communications with and among spacecraft : • streaming engineering (housekeeping) data • real-time commanding • continuous collaborative operation among robotic craft • NASA’s proposed new Command, Control, Communications, and Information (C3I) architecture is based on this model. • Challenges in large-scale asynchronous message exchange: • Heterogeneity: platforms, security regimes, communication environments, QOS requirements, performance requirements, cost tolerance. • Changing topology: requires autonomous discovery of communication endpoints, automatic reconfiguration. • Publish/subscribe message exchange model scales better than client/server.
Asynchronous Message Service (2 of 3) • But most asynchronous message exchange systems are: • proprietary, licensed products (e.g., TIBCO Rendezvous, NDDS) rather than open international standards; • not designed for operation on deep space robots. • Proposed CCSDS Asynchronous Message Service (AMS) standard is based on proven NASA technology: no commercial licensing, designed for spacecraft flight operations. • Tramel (Task Remote Asynchronous Message Exchange Layer) was developed in JPL’s Flight Systems Testbed (FST) in 1995-1996; mature and stable since 1998. • Real-time spacecraft simulation in FST (1994-1999). • Software fault tolerance experiments at JPL (1998). • X-34 Integrated Vehicle Health Management testbed (2003). • Baselined for inclusion in C3I.
Asynchronous Message Service (3 of 3) • AMS features: • Platform-neutral, UT-layer neutral. • Designed to scale from very small to very large configurations. • Self-configuring and fault-tolerant, via silent “meta-AMS” protocol. • “Remote AMS” adaptations enable efficient, delay-tolerant publish/subscribe capability over interplanetary distances. • Status: • Concept paper (tentative protocol specification) ready for review. • Fully-functional, well-documented prototype (Tramel) has been mature for six years.
Deep Space Communications Architecture User application AMS CFDP file system functions 7 CFDP unacknowledged transmission (no retransmission, no store-and-forward) UT adapter UT adapter Bundling store-and-forward (bandwidth management) TCP end-to-end retransmission 4 IP network routing 3 “UT layer” LTP point-to-point retransmission COP/P retransmission 2 TM/TC, AOS Prox-1 Ethernet R/F, optical wire 1