Download

1 / 10
100 likes | 226 Vues
This paper explores advanced distributed algorithms aimed at achieving dynamic coverage in sensor networks. Focusing on the maintenance of best and worst coverage radii, we introduce mechanisms for efficiently managing redundant nodes and implementing lazy coverage strategies with limited mobility. By defining key terms such as the best and worst coverage radii, we outline methods for detecting coverage breaches, maintaining coverage boundaries, and minimizing energy costs. The proposed strategies ensure effective communication among sensors while optimizing area coverage and resource utilization in dynamic environments.

E N D
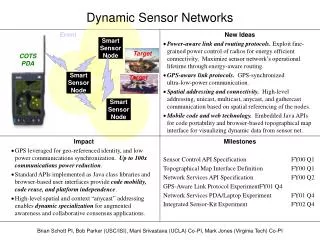
Distributed Algorithms for Dynamic Coverage in Sensor Networks Lan Lin and Hyunyoung Lee Department of Computer Science University of Denver
Outline • Dynamic maintenance of best and worst coverage radii • Dynamic coverage with migration of redundant nodes • Lazy coverage with different radii and limited mobility
Best and Worst Coverage Radii Let D(P,r) be the union of all disks centered at points of P with radius r, where Pis a set of sensor nodes. • Best coverage radiusis the minimum coverage radius r such that there exists a trajectory between S and Tthat is totally covered by D(P, r). • Worst coverage radius is the maximum coverage radius r such that there exists a trajectory between S and Tthat is covered by the complement of D(P, r). Property: • For best (worst) coverage radius, there exists at least one pair of nodes whose disks are tangent to each other. T S S T
Dynamic Maintenance of Best and Worst Coverage Radii • Given two sets of nodes P and Q, find the shortest distance D(P, Q) = minp∈P { minq∈Q {d(p,q)}}. • Condition: communication range is twice of sensing range. • Scheme • Maintain the coverage boundary. • Detect a breach. • Determine the new best and worst coverage radii.
Maintenance of Boundaries Three types of boundary: • inner, outer, holes. Boundary events: • Loss of boundary node. • Loss of non-boundary node. • Non-boundary node moving within range of boundary nodes. Critical node: • Boundary node whose disk is not continuously covered by other nodes.
Dynamic Best Coverage Radius • Message complexity: O (n1/2 log n). T S
Dynamic Coverage with Redundant Nodes • Redundant node: node whose sensing disk is completely covered by other nodes. • Redundant node as recovery node. • Communication tree: connect a non-redundant node to its closest recovery node.
Tree Operations Insertion: Non-redundant node and redundant node. d d a a A b b A c B c B Deletion: Redundant node. a c A b e f d B C a c b e f A d B C
Dynamic Coverage Maintenance • Energy costs: • Movement: Em = k · d, where k is a constant determined by the vehicle, d is the distance moved. • Sensing: Es = l · r2, where l is a constant specified by the sensing equipment, r is the sensing radius. • Total: Etotal = Em +Es • Suppose a failed node X has m neighbors, S1, S2, . . . , Sm. Let the area covered by each node be A(Si), for i = 1, 2,. . .m. Let the area covered by X be A(X). Find the combination of movements of the neighbors to new positions P1, P2, . . . , Pm and employments of different radii of sensing range for S1, S2, . . . , Sm, such that the following conditions are fulfilled. • A(X) ∩ (Ui A(S i)) is maximized, • ∑iEtotal, i is minimized. • Lazy coverage strategy • Each node knows its one- and two-hop neighbors. • No recovery until a certain percentage of coverage loss occurs in one-hop neighborhood.