Comprehensive Guide to Solving Physics Problems: Kinematics, Dynamics, and Energy
This guide outlines essential steps for problem-solving in physics, covering geometry, data organization, and equation formulation. It emphasizes numerical calculations and the verification of results through dimensional analysis, functional checks, and error estimation. Key formulas related to kinematics, dynamics, and rotational motion are provided to aid in understanding concepts such as momentum, energy, and collision dynamics. Equipped with examples from real-world physics problems, this resource is invaluable for students seeking to master the principles of mechanics.

Comprehensive Guide to Solving Physics Problems: Kinematics, Dynamics, and Energy
E N D
Presentation Transcript
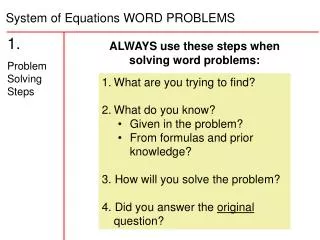
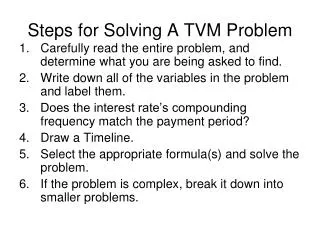
Problem Solving Steps 1. Geometry & drawing:trajectory, vectors, coordinate axes free-body diagram, … 2. Data:a table of known and unknown quantities, including “implied data”. 3. Equations ( with reasoning comments ! ), their solution in algebraic form, and the final answers in algebraic form !!! 4. Numerical calculations and answers. 5. Check: dimensional, functional, scale, sign, … analysis of the answers and solution.
Formula Sheet – PHYS 218 Mathematics π = 3.14…; 1 rad = 57.30o= 360o/2π; volume of sphere of radius R: V = (4π/3)R3 Quadratic equation: ax2 + bx + c = 0 → Vectors and trigonometry: Calculus:
Chapters 1 - 3 Constants: g = 9.80 m/s2, Mearth = 6·1024 kg, c = 300 000 km/s, 1 mi = 1.6 km 1-Dimensional Kinematics: 3- or 2-Dimensional Kinematics: Equations of 1-D and 3-D kinematics for constant acceleration: Circular motion:
Chapters 4 – 7 Dynamics: Energy, work, and power: Chapters 8 – 11 Momentum: Rotational kinematics:ω = dθ/dt, α = dω/dt, s = r θ, vtan = rω, atan= rα, arad= ac = rω2 Constant acceleration: ω = ω0+αt; θ = θ0+(ω0+ω)t/2, θ = θ0+ω0t+αt2/2, ω2 = ω02+2αΔθ I = Σimiri2, I=Icm+Mrcm2, KR=Iω2/2, E=Mvcm2/2+Icmω2/2+U, WR= ∫τdθ, PR=dWR/dt=τ·ω Rotational dynamics:τ = Fl= Fr sinφ, Rigid body rotating around a symmetry axis: Iαz = τz , Equilibrium: Pressure: p = F┴/A
Exam Example 18: The Ballistic Pendulum(example 8.8, problem 8.43) y A block, with mass M = 1 kg, is suspended by a massless wire of length L=1m and, after completely inelastic collision with a bullet with mass m = 5 g, swings up to a maximum height y = 10 cm. L Vtop=0 Find: (a) velocity v of the block with the bullet immediately after impact; (b) tension force T immediately after impact; (c) initial velocity vx of the bullet. Solution: (a) Conservation of mechanical energy K+U=const (b) Newton’s second law yields (c) Momentum conservation for the collision
Exam Example 20: Head-on elastic collision (problems 8.48, 8.50) Data: m1, m2, v01x, v02x Find: (a) v1x, v2x after collision; (b) Δp1x, Δp2x , ΔK1, ΔK2 ; (c) xcm at t = 1 min after collision if at a moment of collision xcm(t=0)=0 V01x y’ V02x m1 X’ m2 Solution: In a frame of reference moving with V02x, we have V’01x= V01x- V02x, V’02x = 0, and conservations of momentum and energy yield m1V’1x+m2V’2x=m1V’01x→ V’2x=(m1/m2)(V’01x-V’1x) m1V’21x+m2V’22x=m1V’201x→ (m1/m2)(V’201x-V’21x)=V’22x= (m1/m2)2(V’01x- V’1x)2→ V’01x+V’1x=(m1/m2)(V’01x–V’1x)→ V’1x=V’01x(m1-m2)/(m1+m2) and V’2x=V’01x2m1/(m1+m2) (a) returning back to the original laboratory frame, we immediately find: V1x= V02x+(V01x– V02x)(m1-m2)/(m1+m2) and V2x = V02x +(V01x– V02x)2m1/(m1+m2) 0 X (a)Another solution: In 1-D elastic collision a relative velocity switches direction V2x-V1x=V01x-V02x. Together with momentum conservation it yields the same answer. (b) Δp1x=m1(V1x-V01x), Δp2x=m2(V2x-V02x) → Δp1x=-Δp2x(momentum conservation) ΔK1=K1-K01=(V21x-V201x)m1/2, ΔK2=K2-K02=(V22x-V202x)m2/2→ΔK1=-ΔK2(E=const) • xcm = (m1x1+m2x2)/(m1+m2) and Vcm = const = (m1V01x+m2V02x)/(m1+m2) → xcm(t) = xcm(t=0) + Vcm t = t (m1V01x+m2V02x)/(m1+m2)
Exam Example 21: Head-on completely inelastic collision (problems 8.86) Data: m2=2m1, v10=v20=0, R, ignore friction Find: (a) velocity v of stuck masses immediately after collision. (b) How high above the bottom will the masses go after colliding? y Solution: (a) Momentum conservation m1 Conservation of energy: (i) for mass m1 on the way to the bottom just before the collision (ii) for the stuck together masses on the way from the bottom to the top (b) h x m2
Exam Example 23:Blocks descending over a massive pulley(problem 9.83) ω Data: m1, m2, μk, I, R, Δy, v0y=0 m1 R Find: (a) vy; (b) t, ay; (c) ω,α; (d) T1, T2 Solution: (a)Work-energy theorem Wnc= ΔK + ΔU, ΔU = - m2gΔy, Wnc = - μk m1g Δy , since FN1 = m1g, ΔK=K=(m1+m2)vy2/2 + Iω2/2 = (m1+m2+I/R2)vy2/2 since vy = Rω x 0 m2 ay Δy y (b) Kinematics with constant acceleration: t = 2Δy/vy , ay = vy2/(2Δy) (c) ω = vy/R , α = ay/R = vy2/(2ΔyR) (d) Newton’s second law for each block: T1x + fkx = m1ay → T1x= m1 (ay + μk g) , T2y + m2g = m2ay → T2y = - m2 (g – ay)
Combined Translation and Rotation: Dynamics Note: The last equation is valid only if the axis through the center of mass is an axis of symmetry and does not change direction. Exam Example 24: Yo-Yo has Icm=MR2/2 and rolls down with ay=Rαz (examples 10.4, 10.6; problems 10.20, 10.75) Find: (a) ay, (b) vcm, (c)T Mg-T=May τz=TR=Icmαz ay=2g/3 , T=Mg/3 y ay
Exam Example 25: Race of Rolling Bodies(examples 10.5, 10.7; problem 10.22, problem 10.29) y Data: Icm=cMR2, h, β Find: v, a, t, and min μs preventing from slipping FN x = h / sinβ β x Solution 1: Conservation of Energy Solution 2: Dynamics (Newton’s 2nd law) and rolling kinematics a=Rαz fs v2=2ax
Equilibrium, Elasticity, and Hooke’s Law Conditions for equilibrium: Exam Example 26: Ladder against wall(example 11.3, problem 11.10) d/2 h x Static equilibrium: y State with is equilibrium but is not static. Data: m, M, d, h, y, μs Find: (a) F2, (b) F1, fs, d θ Strategy of problem solution: (c) ymanwhen ladder starts to slip (0) • Choice of the axis of rotation: arbitrary - the simpler the better. (ii) Free-body diagram: identify all external forces and their points of action. (iii) Calculate lever arm and torque for each force. (iv) Solve for unknowns. Solution: equilibrium equations yield (a) F2= Mg + mg ; (b) F1 = fs Choice of B-axis (no torque from F2 and fs) F1h = mgx + Mgd/2 → F1= g(mx+Md/2)/h = fs (c) Ladder starts to slip when μsF2 = fs, x = yd/h → μsg (M+m) = g (mymand/h+Md/2)/h →