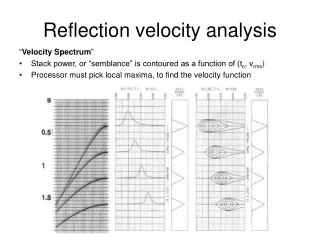
Velocity Analysis Using Shaping Regularization: A Collaborative Research Framework
This presentation discusses velocity analysis and model building utilizing shaping regularization as a framework for nonlinear inversion. The methodology integrates the R-algorithm and iterative thresholding, emphasizing local slope estimation and its application in seismic tomography. By leveraging collaborative research environments, it aims to enhance reproducibility in computational sciences and engineering. The talk revisits historical concepts from Isaac Newton and Robert Hooke, linking their principles to modern data processing techniques in seismic analysis.

Velocity Analysis Using Shaping Regularization: A Collaborative Research Framework
E N D
Presentation Transcript
UTAM Sponsor Meeting 2009 Velocity Analysis Using Shaping Regularization Sergey Fomel
“If I have seen a little further it is by standing on the shoulders of Giants.” February 5, 1676 Isaac Newton Robert Hooke
s e Linearization • Hooke’s law • elastic theory • seismic waves • Newton’s method • gradient optimization • seismic tomography
The Marmousi experience (Versteeg, 1994)
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
Forward and Backward • m model (what we want to find) • d data (what we measure) • d = F[m] forward operator (accurate) • m0 = B[d] backward operator (affordable) • m = m + B[d] - BF[m] • mk+1 = mk + B[d] - BF[mk] • Landweber iteration (R-algorithm)
Sergey V. Goldin (1936-2007)
Landweber Iteration • mk+1 = mk + B[d] - BF[mk] • converges to the solution of B[d]=BF[m] if spectral radius (I-BF) < 1 • alternatively iteration in the data space dk+1 = dk + d - FB[dk] and mk= B[dk] “adding the noise back” (Osher et al., 2005)
Regularized Iteration • mk+1 = S[mk + B[d] - BF[mk]] • S shaping operator • Example: sparsity-constrained inversion • (Daubecheis et al., 2004) • Thresholding • ║d - F m ║2 + ║m║1 • m = S[m + B[d] - BF[m]] • m = [I + S (BF-I)]-1 SB[d]
Shaping Regularization • m = [I + S (BF-I)]-1 SB[d] • (Fomel, 2007; 2008) Shaping
Shaping versus Tikhonov/Bayes • m = [I + S (BF-I)]-1 SB d • m = M F* [F M F* +N]-1 d • S = [I+ M-1 ]-1 • B = F* N-1
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
Toy problem • Model m • Data and forward operator d = F[m] • Backward operator m0 = B[d] • local slopes • Shaping operator S[m] • smooth models • blocky models
Forward Operator (Stoffa et al, 1982) q Dz
Predict each trace from its neighbor • Minimize prediction error (least squares) • Apply shaping regularization
Backward Operator (Fomel, 2007)
Backward Operator • Interval velocity as a data attribute! • T(t,p), v(t,p)
Assumptions 1-D no multiples no AVO Forward operator ray tracing Backward operator local slopes hyperbolic moveout Shaping operator smooth blocky Extensions 3-D waveform modeling stereoslopes anisotropy Toy problem
Outline • Shaping framework for nonlinear inversion • R-algorithm (Goldin, 1986) • Iterative thresholding (Daubechies et al. , 1994) • Toy problem • 1-D velocity estimation • local slopes • Collaborative research environments
http://ahay.org Collaborative Research Environment • “Reproducible research” • Open source • Open community • Open science
The mission of ICES isto provide the infrastructure and intellectual leadership for developing outstanding interdisciplinary programs in research and graduate study in computational sciences and engineering. • multi-billion-dollar endowment • independent Board of Trustees • merit-based and open to men and women from around the world
Conclusions • Shaping regularization is a general framework for linear and nonlinear inverse problems. • Velocity analysis and velocity model building • Local slope estimation • Nonstationary matching filtering • Shared research environments enable world-wide collaboration and computational reproducibility. • “Standing on the shoulders of Giants” http://ahay.org