
Understanding Wrist Actions in Powered Prosthetics: A Study of Pronation, Supination, Flexion, and Extension
This article explores the mechanics of wrist actions in powered prosthetics, focusing on how pronation and supination occur when motors turn in the same direction, resulting in opposite rotations of the two sides of a differential. Additionally, it examines flexion and extension, which arise when motors oppose each other, creating torque across the differential to flex the joint. These insights are crucial for developing advanced two-degree-of-freedom powered prosthetic wrists, enhancing user functionality and comfort in rehabilitation.

Understanding Wrist Actions in Powered Prosthetics: A Study of Pronation, Supination, Flexion, and Extension
E N D
Presentation Transcript
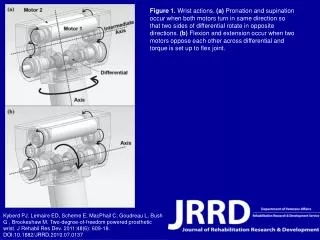
Figure 1. Wrist actions. (a) Pronation and supination occur when both motors turn in same direction so that two sides of differential rotate in opposite directions. (b) Flexion and extension occur when two motors oppose each other across differential and torque is set up to flex joint. Kyberd PJ, Lemaire ED, Scheme E, MacPhail C, Goudreau L, Bush G , Brookeshaw M. Two-degree-of-freedom powered prosthetic wrist. J Rehabil Res Dev. 2011;48(6): 609-18.DOI:10.1682/JRRD.2010.07.0137